Portál AbcLinuxu, 22. června 2026 11:28
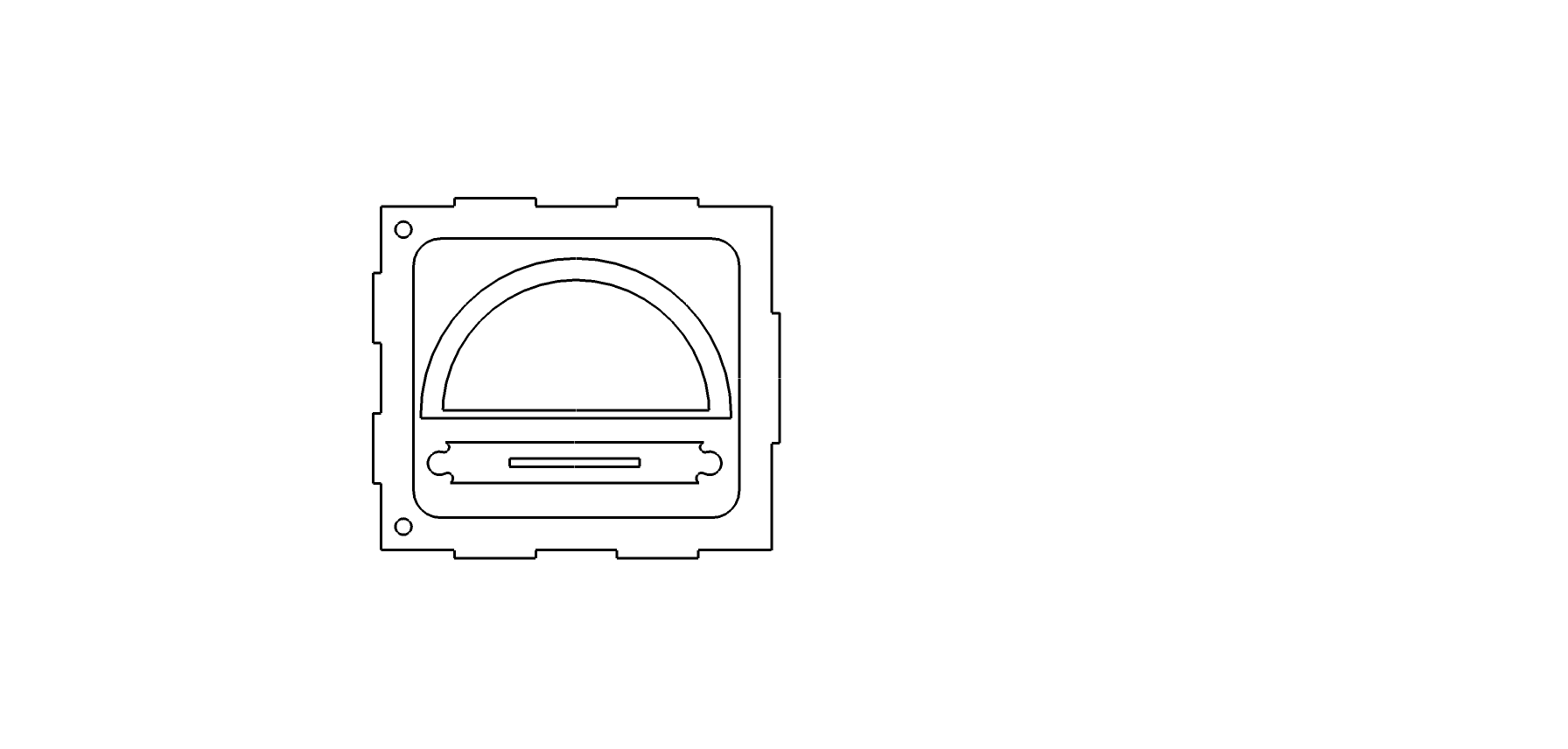
Chceš akorát provést graficky to vyplnění ploch jako na obrázku po.png nebo získat informaci, které křivky spolu tvoří vyplněný objekt?
To první je jednodušší. Hledej „paritní řádkové vyplňování“ nebo „vyplňování rozkladovými řádky“.
 (Sorry nedalo mi to
(Sorry nedalo mi to  )
), ale software dodávaný k těmto zařízením to má již vyřešené., pokud mu to nevadí ), která ovšem podřezání (rozptyl) má větší než laser (laser u tenkých plechů ten rozptyl má zanedbatelný, ale je zbytečné to rozebírat ). Co se týče přesnosti při dobrém seřízení a nastavení je ta přesnost ve 2D rozhodně pod 0.1mm..
)
), ale software dodávaný k těmto zařízením to má již vyřešené., pokud mu to nevadí ), která ovšem podřezání (rozptyl) má větší než laser (laser u tenkých plechů ten rozptyl má zanedbatelný, ale je zbytečné to rozebírat ). Co se týče přesnosti při dobrém seřízení a nastavení je ta přesnost ve 2D rozhodně pod 0.1mm..
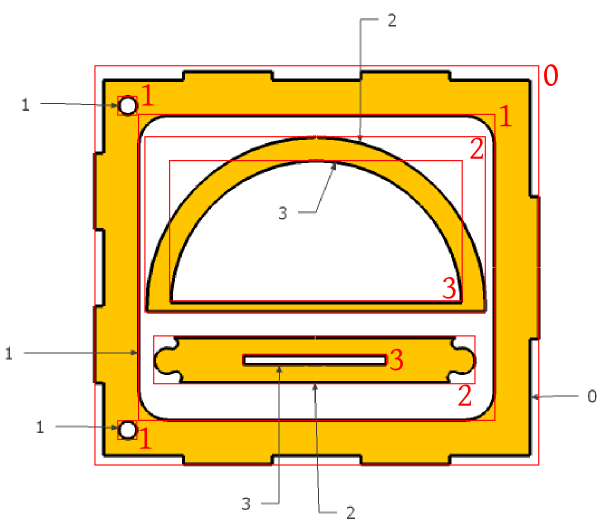
Pořadí řezání:
Snad to bude pochopitelnější z přiloženého obrázku.
Pro určení strany, po které řezat, by snad šlo nějak využít modifikaci toho vyplňovací algoritmu - řeže se po „nevyplněných“ stranách.
Ty konkávní tvary jsem bral v úvahu a mělo by to fungovat i tak. Hodnota se zvyšuje jen v případě, že okno je celé uvnitř jiného, překrývající se v úvahu neberou.
Pokud něco zajímavého vymyslíš tak se pak určitě poděl.
MnozinaKrivek K
Krivka i,j
for i in K:
for j in (K-i):
if (j.bod uvnitr i) then j.level++
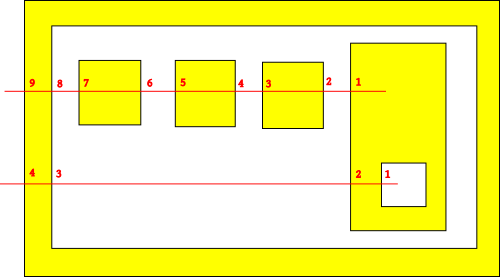
Ještě musíš vzít v úvahu, že u nekonvexních křivek ti to může jednu křivku protnout vícekrát. A další problém je, kam vlastně paprsek vrhat - podívej se na příklad v příloze.
A ještě mám takový dotaz víceméně nesouvisející s postupem co řešíme. Co se vlastně bude dít s tím materiálem, který jde pryč. Jen se odřízne podle obrysů nebo se postupně celý odfrézuje?
)..
) provedeno v bloku (řádku), ve kterém je řazena funkce (G40/G41/G42), takže blok (řádek) předem by jste měl být ve vzdálenosti větší než R nástroje od řezané kontury. A ideální je aby pohyb v bloku kde je kompenzace řazena byl v rovině XY (předpokládám tuto rovinu) větší než R nástroje, pak je pohyb stroje „čistý“.
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
ISSN 1214-1267, (c) 1999-2007 Stickfish s.r.o.
{kind=link}
{kind=link}
{kind=link}
{kind=link}