Multiplatformní prohlížeč elektronických knih KOReader byl vydán ve verzi 2026.07 "Sailing Walrus". U PDF souborů s SMask lze vyčistit pozadí. Přibyla podpora Kobo v5 nebo základní podpora OPDS 2.0.
Společnost Valve sponzoruje a společnost Collabora portuje RADV (open source Vulkan ovladač pro AMD GPU z projektu Mesa) na Windows.
Starling (GitHub) je desktopové prostředí vytvořeno umělou inteligencí (s dohledem jednoho vývojáře během šesti měsíců).
Dne 30. června 2026 byla završena fyzická realizace projektu Czech National Quantum Communication Infrastructure (CZQCI), tedy České národní kvantové komunikační infrastruktury. Projekt byl realizován od 1. března 2023 a financován z Národního plánu obnovy částkou 121,6 milionu Kč. Cílem podpořeného projektu bylo vybudovat základy národní kvantové komunikační infrastruktury a ověřit možnosti jejího praktického využití. Mezi
… více »Město Šumperk se stalo terčem kybernetického útoku, chod úřadu je omezen. Zjišťuje se, jestli unikla nějaká data. Cílem hackerů byla městská datová síť. První útoky zaznamenali odborníci na informační technologie již v pondělí večer, závady se ale plně projevily až dnes ráno. Město událost nahlásilo Národnímu úřadu pro kybernetickou a informační bezpečnost (NUKIB).
Samba, svobodná implementace síťového protokolu SMB/CIFS, byla vydána ve verzích 4.24.5, 4.23.10 a 4.22.11. Řešeno je 6 zranitelností.
Přední technologické společnosti (Adobe, Cadence, Capital One, Cisco, Cloudera, Cloudflare, Cognition, CrowdStrike, Databricks, Dell Technologies, DoorDash, Elastic, HPE, Hugging Face, IBM, LangChain, Linux Foundation, Microsoft, NAVER, NetApp, Nous Research, NVIDIA, OpenClaw, Palantir, Palo Alto Networks, Red Hat, Reflection AI, Salesforce, SAP, ServiceNow, Siemens, SK Telecom, Snowflake, SpacexAI, Synopsys, Thinking
… více »Krabix.cz je online 3D konfigurátor krabiček pro 3D tisk s exportem do STL. Běží přímo v prohlížeči. Nic se neposílá na server.
Nadace Open Home Foundation spustila veřejnou preview verzi komunitní databáze zařízení pro Home Assistant. Má fungovat jako „Wikipedie pro chytrá zařízení".
Na stránce nového panelu Firefoxu přibudou nové widgety. Například denně aktualizována interaktivní křížovka.
void funkce1(int chTime) // chTime - jak dlouho má cykl běžet.
{
unsigned int t0 = CurrentTick(); // začatek cyklu - neměnná hodnota
unsigned int t1 = CurrentTick(); // aktuální doba cyklu
unsigned int overFlow = 0; // detekuje přeteceni CurrentTick
while((t0+chTime)>(t1+overFlow))
{
// ZDE BUDE KÓD, KTERÝ CHCI ČASOVAT
// 1 CYKLUS MŮŽE TRVAT AŽ 2s
t1=CurrentTick(); // aktualizace času smyčky - "aktuální čas"
if(t1 < t0) // kontrola proti přetečení
{
overFlow = 65535;
}
}
}
time(2), gettimeofday(2), alarm(2), setitimer(2), …
Ten kód je celkově dost problematický, není třeba jasné, kde přesně se vzala magická konstanta 65535 (není to spíš 65536?) a počítá se jen s jedním přetečením. Pokud "vrátí okamžitě" znamená, že se cyklus neprovede ani jednou, šlo by to vysvětlit např. tím, že překladač prohodil pořadí těch dvou inicializací a t1 se inicializovala na 65535, ale t0 už na nulu. V každém případě je nesmysl na začátku CurrentTick() (Co to vůbec je? Standardní systémová funkce určitě ne.) volat dvakrát, spíš použijte pro t1 hodnotu, kterou už máte v t0.
šlo by to vysvětlit např. tím, že překladač prohodil pořadí těch dvou inicializací
Nejspíš nešlo. Tím, že je tam volání funkce, tak to udělat nemůže. Jedině že by ta funkce byla inline a prováděla něco jako čtení z nějaké globální proměnné, kterou cosi na pozadí aktualizuje.
Na druhou stranu si lze snadno představit, jak by cyklus neskončil nikdy: pokud se t0 inicializuje na nulu, podmínka "t1 < t0" nebude nikdy splněná a přetečení nedetekujete.
ale v principu by to nemělo vadit
Může, protože pak překladači nic nebrání ty dvě inicializace prohodit. Proto existují věci jako bariéry, abyste mu v tom zabránil. V každém případě ale není sebemenší důvod při inicializaci tu funkci volat dvakrát, prostě použijte stejnou hodnotu pro obě proměnné, je to jednodušší a nebudete riskovat překvapení.
Kdyby se t0 inicializovalo na 0 (což je pouze před započetím časového cyklu), vůbec by to nevadilo, vlastně by to byl ideální případ. Jelikož max časování je jak jsem psal 50 sekund.
Holt si asi každý musí natlouct sám, aby pochopil, jakou trvanlivost tyhle skryté předpoklady mají a jak nepříjemné je pak hledat chyby, které se začnou objevovat, když jednoho dne přestanou platit (v době, kdy už jste dávno zapomněl, kde všude jste to předpokládal). Pokud mermomocí trváte na tom, že to nechcete napsat pořádně, tak aspoň kontrolujte ten argument, ať aspoň víte proč, až to "bouchne".
if(t1 <= t0) a následně overFlow inkrementovat o 65536 kvůli vícenásobnému přetečení.
t0, pro vás je spíš důležité, jestli je menší než minulá hodnota t1 (pokud se můžeme spolehnout, že vám to během jednoho cyklu nenaskočí o 65536 a víc).
Ještě jedna praktická rada:
Ohledně toho CurrenTick() - tohle je programované pro řídicí jednotku robota.
Pokud se dotaz týká nějakého velmi specifického prostředí, kde nelze použít běžné nástroje a obraty, je dobré na to hned na začátku upozornit.
uint16_t t0 = CurrentTick();
while (chTime > 0)
{
...
uint16_t t1 = CurrentTick();
chTime -= t1 - t0;
t0 = t1;
}
Nějak divně tam inicializuješ ty časové proměnné. Když si normálně v běžném userspace naimplementuju CurrentTicks(), daří se mi to vyzkoušet takhle:
#include <stdlib.h>
#include <stdio.h>
#include <time.h>
#include <inttypes.h>
static const size_t BILLION = 1000000000;
static const size_t MILLION = 1000000;
static const uint32_t TIME_MASK = 0xffff;
static const uint32_t TIME_MAX = TIME_MASK + 1;
static const struct timespec PAUSE = {
.tv_sec = 0,
.tv_nsec = 500000000,
};
static uint32_t CurrentTick() {
struct timespec ts;
if (clock_gettime(CLOCK_MONOTONIC, &ts)) {
perror("clock error");
exit(1);
}
const uint64_t ns = (uint64_t)ts.tv_sec * BILLION +
(uint64_t)ts.tv_nsec;
return (uint32_t)(ns / MILLION) & TIME_MASK;
}
static void funkce1(int chTime) {
if (chTime > 0) {
uint32_t t0 = CurrentTick();
do {
/* Tady začíná časovaný kód. */
printf("\tZbývá: %d ms, CurrentTick: %u ms\n", chTime, t0);
struct timespec remaining;
if (nanosleep(&PAUSE, &remaining))
while (nanosleep(&remaining, &remaining));
/* Tady končí časovaný kód. */
const uint32_t t1 = CurrentTick();
chTime -= t1 > t0 ? t1 - t0 : TIME_MAX - t0 + t1;
t0 = t1;
} while (chTime > 0);
}
}
int main() {
const int times_sec[] = {1, 2, 4, 8, 16, 32, 64, 65, 66, 99};
for (size_t i = 0; i < sizeof(times_sec) / sizeof(int); ++i) {
printf("Spouštím časovač na %d s.\n", times_sec[i]);
funkce1(1000 * times_sec[i]);
}
return 0;
}
Tohle^^^ si můžeš rovnou spustit, sledovat, kdy čas přeteče, a zkoušet různé alternativy. Klíčové je, jak se v tom cyklu aktualizuje uplynulý čas.
Pokud by jedna iterace toho časovacího kódu trvala déle než 65536 milisekund, bude samozřejmě tohle řešení nepoužitelné a časování by se muselo řešit jinak.
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz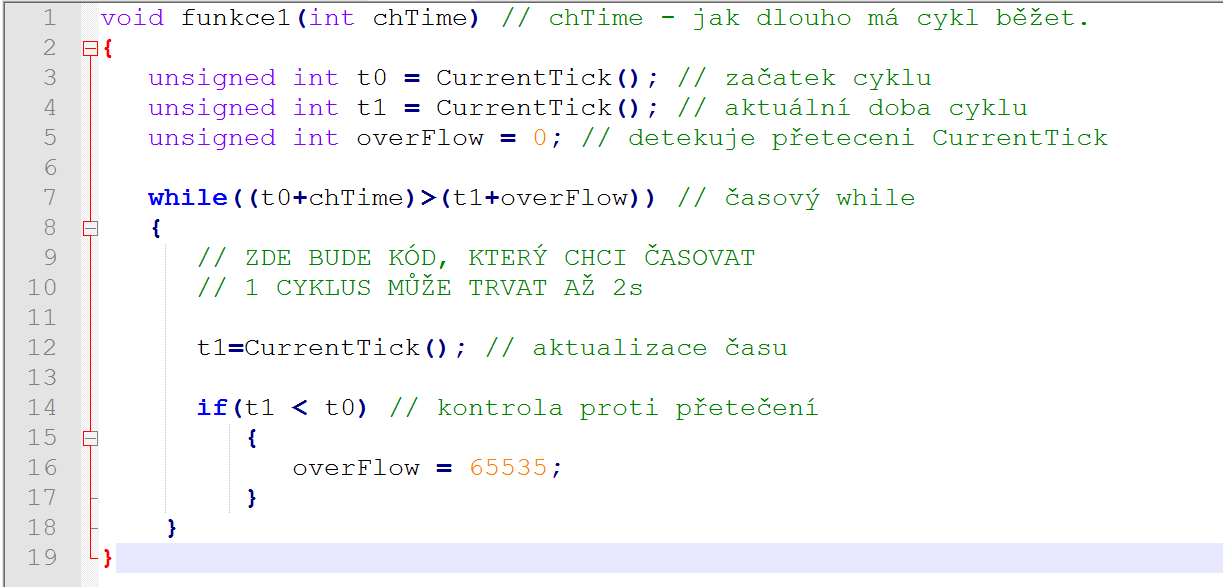{kind=link}