Platformy ChatGPT i Roblox by mohly být zařazeny na seznam mimořádně velkých on-line platforem nebo internetových vyhledávačů, na něž se vztahují zvláštní podmínky podle nařízení o digitálních službách (DSA). Vzhledem k tomu, že ChatGPT i Roblox oznámily počet uživatelů nad prahovou hodnotou DSA, je toto označení „rozhodně možné“ a mohlo by „přijít dříve či později“. On-line platformy a vyhledávače zařazené na seznamy DSA musejí
… více »Společnost Cloudflare představila Cloudflare OS (GitHub), tj. open source platformu navrženou pro integraci umělé inteligence (agentů) přímo do pracovních procesů organizací.
Byla vydána nová verze 5.13 svobodného multiplatformního softwaru pro konverzi a zpracování digitálních fotografií primárně ve formátů RAW RawTherapee (Wikipedie). Vedle zdrojových kódů je k dispozici také balíček ve formátu AppImage. Stačí jej stáhnout, nastavit právo ke spuštění a spustit.
Jean-Baptiste Kempf na svém blogu představil novou verzi 9.0 "Lei" kolekce svobodného softwaru umožňujícího nahrávání, konverzi a streamovaní digitálního zvuku a obrazu FFmpeg (Wikipedie).
Richard Hughes oznámil, že službu Linux Vendor Firmware Service (LVFS) umožňující aktualizovat firmware zařízení na počítačích s Linuxem, nově sponzoruje také společnost NVIDIA.
Edvard Rejthar na blogu zaměstnanců CZ.NIC představil svou aplikaci SlideRshow (GitHub). Funguje jako prohlížeč fotek, ale i jako jejich organizér a prezentátor. Neinstaluje se, běží přímo v prohlížeči. Bez serveru. Offline.
Kermit, tj. protokol pro přenos souborů, vznikl před 45 lety. Při této příležitosti byla po 15 letech od vydání poslední stabilní verze 9.0.302 vydána nová stabilní verze 11 implementace C-Kermit. S podporou IPv6.
První verze konverzního nástroje Pandoc byla vydána před 20 lety. Jeho autor John MacFarlane při tomto výročí rekapituluje jednotlivé etapy vývoje a přidávání nových funkcí – rozšíření nejen Markdownu a podporu mnoha dalších formátů.
Srpen přinesl nejen další spalující vedro, ale také Virtuální Bastlírnu s neméně žhavými novinkami. Využijte tedy předpovědi na deštivý čtvrteční večer a od 20:00 se připojte online k tomuto neformálnímu setkání kutilů, techniků a vědců, kde se strahovskými bastlíři proberete nejzajímavější věci, na které jste narazili za poslední měsíc. Pokud jde o novinky, řeč zcela jistě přijde na systém INDX pro tiskárny Průša, který na konci
… více »Firma T-Mobile blokovala „dezinformační web“ AC24 bez toho, aniž by k tomu měla závazný pokyn orgánů veřejné moci. Píše to ve svém rozsudku Městský soud v Praze, který po čtyřech letech uzavřel kauzu blokace zmíněného webu. Operátor musí uhradit škodu ve výši 35 tisíc korun. Advokát společnosti T-Mobile se snažil i u odvolacího senátu argumentovat tím, že firma jednala v dobré víře, když na stránky omezila přístup poté, co ji k tomu vyzvalo
… více »Připojení teploměru k BeagleBone.
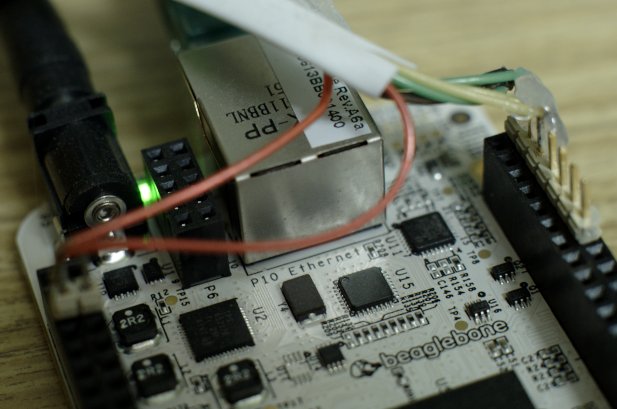
Ještě než začal svět ve velkém blbnout s Raspberry PI, začal jsem si hrát s BeagleBone. BeagleBone je malý ARM počítač podobný Raspberry PI, hlavní rozdíl bych viděl v možnostech rozšiřování - BeagleBone je konstrukčně řešený tak, aby se k němu daly snadno připojovat rozšiřující desky. Ve firmě jsme na BeagleBone postavili malý počítač pro sběr dat: FotobotHW. Protože nám nějaké BeagleBone zbyly, začal jsem si trochu hrát.
Ze šuplíku jsem vytáhnul teploměr DS1820 - to je digiální třínožičkový teploměr. Driver je obsažený přímo v kernelu, neměl by tedy být problém teploměr připojit. I když je to snadné, trvalo mi připojení dost dlouhou dobu - nejobtížnější částí bylo získat potřebné informace. Takže jak na to:
Driver je přímo součástí jádra. V Beaglebonu nepoužívám originální jádro (není zde podpora pro IPv6), překládám si jádro vlastní (ke stažení zde: http://hobrasoft.cz/cs/fotobothw/linux-3.2.34.tar.bz2). Zde je driver součástí defaultní konfigurace. Pátráním ve zdrojácích jsem nakonec našel příslušné vývody - a taky to, že tato informace se vypisuje při bootu kernelu. Vypsat si ji můžeme třeba takto:
dmesg | grep w1 [ 0.463470] BeagleBone cape: initializing w1-gpio [ 0.463592] w1-gpio connected to P8_6
Abychom rozluštili zkratku P8_6, potřebujeme manuál k BeagleBone. Jde o vývod č. 6 na konektoru P8. Na tento vývod tedy přijde připojit datový vodič sběrnice.
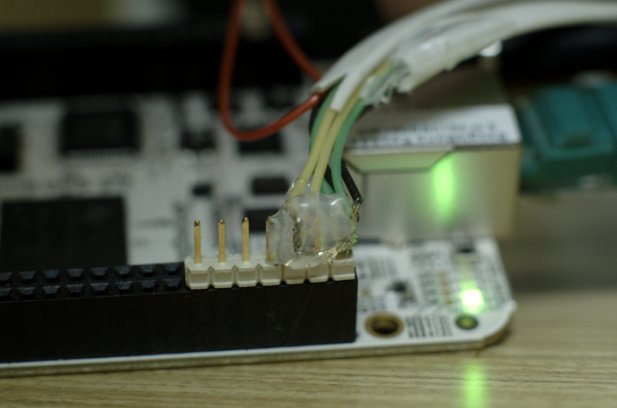
Pro připojení teploměru potřebujeme ideálně tři vodiče - zem, data a napájení. Zem najdeme na vývodu P8_1 a P8_2, napájení pak na P9_3.
Po připojení teploměru už by měl být teploměr kernelem viděn. Ověřit to můžeme v adresáři /sys/bus/w1/devices:
ls /sys/bus/w1/devices/ 28-0000027d912e 28-00000294d39a w1_bus_master1
Super! Kernel našel na sběrnici dva teploměry. Jaká je tedy teplota?
cat /sys/bus/w1/devices/28-0000027d912e/w1_slave 6f 01 4b 46 7f ff 01 10 67 : crc=67 YES 6f 01 4b 46 7f ff 01 10 67 t=22937
Teplota je vypsaná parametrem t. Desetinná tečka není uvedená. Hodnota 22937 odpovídá teplotě 22.937 stupňů Celsia.
Nyní už je snadné se pochlubit teplotou ve své kanceláři (pouze přes IPv6):
Stránky jsou pouze statické, generované každých 15 vteřin. Obrázky, CSS a vše ostatní se tahá odjinud.
Po napsání článku jsem připojil ještě šuplíkový LCD displej. Prodrátování na fotkách není vidět.

Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 3.3.2014 17:04
Petr Bravenec | skóre: 43
| blog: Bravenec
3.3.2014 17:04
Petr Bravenec | skóre: 43
| blog: Bravenec
 Měl bych zájem.
5.3.2014 08:18
Petr Bravenec | skóre: 43
| blog: Bravenec
Měl bych zájem.
5.3.2014 08:18
Petr Bravenec | skóre: 43
| blog: Bravenec
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz