FreeBSD odstranilo poslední GPL kód ze základního systému. Konkrétně dpv, libdpv, libfigpar a dialog. Instalátor před čtyřmi lety přešel z dialogu na bsddialog.
Sociální síti 𝕏 (dříve Twitter) má dnes 20 let. Pro veřejnost byla zpřístupněna 15. července 2006.
Insula Faktury je open source generátor faktur, který běží přímo ve webovém prohlížeči. Žádná registrace, žádné sledování, žádné omezení. Zdrojové kódy jsou k dispozici na Codebergu.
První Mobile Linux Hackday v Plzni, tj. komunitní setkání věnované Linuxu na mobilních zařízeních, proběhne 24. července od 10:00. Akce je otevřená všem zájemcům – od zvědavců po zkušené vývojáře. Dopoledne proběhnou přednášky Davida Heidelberga a Petra Hodiny o aktuálním stavu mobilního Linuxu: proč vůbec chtít tučňáka v kapse, jaké telefony jsou dnes dobře podporované a co taková podpora obnáší. Po obědě se zaměříme na konkrétní
… více »3D software Blender byl vydán ve verzi 5.2 s prodlouženou podporou. Videopředstavení na YouTube.
SketchForge 3D (GitHub, reddit) je open source 3D editor / CAD běžící ve webovém prohlížeči bez nutnosti účtu nebo cloudového úložiště. Inspirovaný byl Tinkercadem. Doporučena je lokální instalace.
Byla vydána nová verze 11.9 webového prohlížeče Midori (Wikipedie, GitHub). S novým centrem ovládání, pokročilejším blokováním reklam, optimalizací výkonu…
Na Crowd Supply běží kampaň na podporu open source čtečky elektronických knih Open Book Touch. Postavena je na ESP32-S3. Má 4,26palcový dotykový e-papírový displej s rozlišením 480×800 pixelů, podsvícení, slot na microSD kartu. Cena je 149 dolarů a poštovné 12 dolarů. Dodání je plánováno na duben 2027.
Na Humble Bundle běží akce Linux: All the Things by O'Reilly a Picos, HATs, and More by Raspberry Pi Press. Elektronické knihy lze koupit se slevou a současně podpořit organizace Code for America a Raspberry Pi Foundation.
FreeCAD (Wikipedie), tj. svobodný multiplatformní parametrický 3D CAD, má nový vtipný a současně užitečný doplněk Banana For Scale (GitHub). Aktuálně umožňuje do výkresu vložit banán nebo plechovku pro porovnání a určení měřítka.
 10.4.2009 20:12
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
10.4.2009 20:12
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
Já si jen už pamatuju, že se to řešilo jako rozdíl momentů dvou kuželů.
Pro kinetickou energii hmotného bodu platí vztah
T = 1/2 m0 v2.
Při rovnoměrném pohybu po kružnici s úhlovou rychlostí ω máme v = ω r, kde r je vzdálenost od osy otáčení, máme
T = 1/2 m0 r2ω2 = 1/2 I0ω2,
kde I0 je moment setrvačnosti.
Pokud máme hmotných bodů více, platí pro jejich moment setrvačnosti
I = Σi Ii = Σi mi ri2.
Pokud nejde o hmotné body, ale tuhé těleso, máme místo konečného součtu součet infinitezimální, tedy integrál:
I = ∫ r2 dm.
Použít hmotnost jako integrační proměnnou se moc nehodí. Vyjádříme ji raději pomocí hustoty a objemu, tedy dm = ρ dV:
I = ∫ r2 ρ dV.
Je-li hustota konstatní, lze ji vytknout před integrál.
Nyní je možné přikročit k vlastnímu výpočtu, který je v článku, který odkazujete. Počítat ale přímo z této definice moment setrvačnosti kolem obecné osy je docela pracné.
Muzu se jen tak ze zvedavosti zeptat, k cemu to potrebujete?
Kazdopadne, ja bych na to sel rozdilem tech 2 kuzelu a Steinerovou vetou, to mate asi nejjednodussi.
Kdopak ze zdejších vysvětlovačů a odkazovačů na Riemanna si všiml, že zadaná osa momentu setrvačnosti je v nejlepším případě kolmá na jeho výšku a tudíž i osu a v jakémkoliv jiném je ve zcela obecné poloze?
Aneb kdo tu dá do zítřejší osmé hodiny ranní správně vyřešený integrál pro ten nejlepší možný případ, tedy:
moment setrvačnosti pro komolého kužele s kružnicovými podstavami, jejihž středy leží na stejné přímce, a které leží ve vzájemně různých rovnoběžných rovinách kolmých na osu kužele, okolo osy, jež je kolmá na osu kužele a prochází jeho těžištěm
má u mě pivo 

Opravdu? Hned ten první integrál od nuly do dvou pí vypadá na to, že sis vybral špatnou osu. Viz obrázek v příloze (pro zjednodušení tam je situace pro normální kužel s osou položenou do jeho vrcholu).
Zkus si prohlidnout to reseni pro normalni kuzel, jak na nej odkazuje autor blogu. Rotace kolem os X a Y kolmych na Z je ten posledni odstavec (nebo se snad melo pocitat neco jineho nez hlavni moment?). Jestli ti to z toho nebude jasne, tak si to zkus presdtavit, ze musis vyscitat (vyintegrovat) pres vsechny body a to napr. tak, ze vyintegrujes pres vsechny kruhy (jednotlive rezy kuzele) - to je ta integrace od 0 do 2\pi a od 0 do R a pak pres vsechny rezy - integrace podle osy Z. Dal by te mohlo mast, jak se o pocita - coz je asi jediny figl toho vypoctu - ze moment vzhledem k X a Y je stejny, takze se spoctou dohromady, cimz se ten integral podstatne zjednodusi a pak se to vydeli dvema...
Aha, omlouvám se, koukal, ale špatně. Ted už koukám pořádně, 1/2(I_x+I_y) je pěkný nápad. Mě zmátlo, že jsi napsal jako první integrál jen r^3, což je geometrická osa, pokud už nejsem úplně mimo.
Ad tenzor -- pokud jsme už všechno nezapomněl, tak pokud máš hlavní osy podél souřadnicových, je tenzor čistě diagonální, tudíž stačí ty tři momenty. Mimodiagonální členy vylezou až z dalších transformací souřadnic.
Mnohokrate dekuju! Ve srovnani s mym resenim skrze odecitani momentu setrvacnosti te odrizle spicky od momentu puvodniho nekomoleho kuzele je to kratsi a zbavil jsi me nekolika promennych: hmotnosti odrizle spicky a polomeru jeji zakladny (ackoliv polomer stejne potrebuji pro vypocet objemu). Jsem zvedav zda to vyjde stejne jako me nebo jsem tam neco pokonil :) K tomu nac to potrebuju.. Zabyvam se lokomoci cloveka a jeho dolni koncetinu jsem vymodeloval jako soustavu dvou komolych kuzelu (stehna a berce), ktera se pri chuzi kyve (samozrejme ne kolem osy prochazejici tezistem, ale podstavou), pokud uvazuju spravne, tak kazdym krokem, ktery udelam musim moment setrvacnosti soustavy prekonat pri vykroceni a pak pri doslapnuti. Pak se do toho zamotaji dalsi promenny jako delka kroku, hmotnost tela a takove podobne a zjistim jestli je energeticky vyhodnejsi mit delsi nebo kratsi koncetinu, coz se pak pouzije pro interpretaci evoluce cloveka hehehe
Hodně štěstí. Možná vám ten model bude souhlasit s nálezy, ale možná taky budou vycházet blbosti - pak to asi bude chtít uvažovat setrvačnost při posuvných pohybech u lýtka, nebo vzít do úvahy konečnou pevnost a modul pružností kostí a tyto dát do vztahu s velikostí a hmotností postavy...
Pevnost, pruznost a prurez predevsim holenni kosti budou hrat zrejme vyznamnou roli. Predchozi teoreticke studie tento faktor pomerne zanedbavaly a pak slozite vymyslely cim ze to nevychazi stejne jako experimentalni mereni. Vliv setrvacnost posuvnych pohybu berce mi na prvni pohled prilis jasny neni, ani jsem se zatim nesetkal se zakomponovanim tohoto faktoru do modelace chuze, ale podivam se na to. Dekuji za namety.
Další věc je chodidlo. Ano, těžko se modeluje, ale už samotný fakt, že po amputaci prstů na noze se člověk musí naučit znovu chodit, napovídá, že i tak malé části mohou mít na pohyb člověka nezanedbatelný vliv. Samozřejmě zahrnutím chodidla do modelu vzniknou složitosti typu víc možných bodů dotyku se zemí, ale když budou vycházet blbosti, bude to možná ta pravá cesta.
Zanedbávat posuvná zrychlení bérce mi moc košer nepřipadá, protože v okamžicích okolo odrazu a došlapu rozhodně nejsou zrovna malá.
Další možná neprávem zanedbaný vliv bude tvar terénu, po přímé rovné cestě s konstantním sklonem se chodí trochu jinak, než po prudké hrbolaté pěšině vinoucí se úbočím rokle, nebo po pěšině jdoucí po spádnici prudkého svahu skrz padlé stromy.
Ještě k tomu výpočtu momentu setrvačnosti: pro daný účel mi připadá výpočet jednotlivých prvků ve 3D jako overkill. Dostatečně přesné a jednodušší na výpočet to IMHO bude, když ty prvky budeš modelovat jako pruty. Moment setrvačnosti se pak spočítá pro prut s jednotkovou plochou a proměnnou hmotností na běžný metr, nebo s proměnnou plochou a konstantní hustotou. Pak se ty vícenásobné integrály a Steinerovy věty zjednoduší na integrál přes úsečku dané délky, kde ti stačí pro výpočet třetí vzorec odsud. Viz přílohu, kde máš ukázkový výpočet pro zanedbanou průřezovou plochu (A = 1 m^2) a lineárně klesající hmotnost na běžný metr od osy otáčení k druhému konci prutu (což odpovídá lineárně klesající ploše, kdyby lineárně klesal poloměr jako u komolého kužele, vycházelo by to jinak).
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz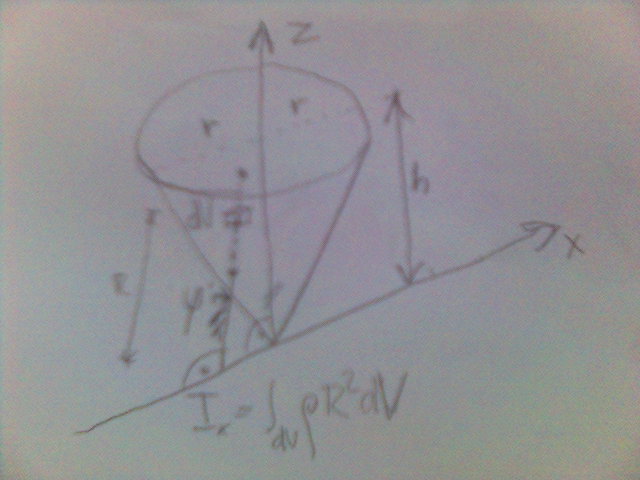{kind=link}