Nejnovější X.Org X server 21.1.24 a Xwayland 24.1.13 řeší 2 bezpečnostní chyby.
Clement "Clem" Lefebvre publikoval souhrn dění v Linux Mintu za červen 2026. Vypíchnuta je vylepšená podpora Waylandu. Už není považována za experimentální. V příští verzi Linux Mintu, plánována je na Vánoce, bude běh Cinnamonu plně podporován na X11 i Waylandu. V květnu na vývoj Linux Mintu přispělo 611 dárců celkovou částkou 19 612 dolarů. Dalších 2 326 patronů přispělo na Patreonu celkovou částkou 5 334 dolarů.
V Linuxu v KVM byla nalezena a v upstreamu již byla opravena kritická zranitelnost Januscape aneb CVE-2026-53359. Root na hostovaném počítači (virtuální stroj) může obejít izolaci a získat plnou kontrolu nad hostitelským systémem (DoS útok nebo vzdálené spuštění kódu s právy roota). Na obou hlavních architekturách – Intel i AMD. Zranitelnost v Linuxu existovala téměř 16 let (od srpna 2010 do června 2026).
Tribunál Soudního dvora Evropské unie dnes zamítl několik žalob, v nichž se americká společnost Apple ohrazovala proti pravidlům fungování velkých technologických společností na unijním trhu. Applu se nelíbilo, že jeho obchod s aplikacemi a operační systém iOS mají podléhat přísnějším povinnostem jen proto, že Brusel firmu považuje za takzvaného gatekeepera, tedy strážce přístupu.
Na WhatsAppu budou postupně v průběhu následujících měsíců zavedena uživatelská jména. Telefonní čísla tak mohou zůstat soukromá. Aktuálně si lze uživatelské jméno rezervovat.
Byl aktualizován TIOBE Index (Wikipedie). Programovací jazyk Rust se poprvé dostal do první desítky tohoto žebříčku popularity programovacích jazyků. Vede Python následovaný C, C++, Java, C#, …
Proton (Wikipedie), tj. fork Wine integrovaný ve Steamu umožňující na Linuxu hrát hry určené pouze pro Windows, byl vydán ve verzi 11.0-1. Přehled novinek se seznamem nově podporovaných her na GitHubu. Aktuální přehled všech podporovaných her na stránkách ProtonDB
Byly publikovány zdrojové kódy počítačové hry Unturned. Pro nekomerční účely. V plánu je přelicencování pod MIT. Hra Unturned je postavena nad multiplatformním herním enginem Unity.
První česká družice navržená a sestavená výhradně studenty se dostala na oběžnou dráhu Země. Družice KOSTKA, kterou vyvinul studentský tým YSpace z Vysokého učení technického v Brně (VUT), dnes odstartovala na palubě rakety Falcon 9 společnosti SpaceX v rámci mise Transporter-17 z kalifornské základny Vandenberg Space Force Base.
Po nákresech ovladače Steam Controller a puku společnost Valve na svém GitLabu publikovala projekt Inkterface, tj. podrobný návod (PDF, video v mp4) na sestavení předního panelu s e-papírovým displejem pro Steam Machine pro zobrazování systémových informací. Použity jsou součástky od společnosti Adafruit.
IrDA už není v módě. Na nových základových deskách je už nenajdeme. Jistě, existují poměrně levné USB převodníky (pokud se je podaří pod linuxem zprovoznit). Co když ale máte vysílač/příjmač IrDA zabudovaný do bedny počítače a vyhovuje vám to? Můžete si postavit jednoduchý převodník RS232 ←→ IrDA založený na čipu MCP2120.
MCP2120 je převodník IrDA na UART, který zvládá rychlosti až do 115200 baudů (resp. dá se „přetaktovat“ na vyšší rychlost, jenže to už velikost pulzu nebude odpovídat standardu IrDA), tedy tzn. IrDA SIR. Ovšem vstup/výstup na UART je v TTL logice, takže chceme-li jej připojit přímo na sériový port v počítači, musíme použít převodník, např. profláklý MAX232 (viz třeba tento článek tady na abclinuxu.).
Má to ale háček. IrDA SIR většinou kvůli zpětné kompatibilitě používa dvě rychlosti: 9600 baudů pro identifikaci zařízení a 115200 pro vlastní datové přenosy. MCP2120 umožňuje nastavení rychlosti dvěma způsoby: buď „natvrdo“ krz piny BAUD0-BAUD2, což se pro takovéto přepínání moc nehodí (to je určeno spíše k připojení k nějakému mikročipu). Proto většina převodníků postavených na MCP2120 použivá jiného způsobu řízení, kdy je jeden RS232 signál (DTR) použit k přepínání převodníku do řídícího módu, ve kterém byte přijatý přes UART říká, jakou rychlostí se má vysílat. Ovšem někdy se stane, že je převodník „rozhozen“ a druhá strana by nevědela, jakou rychlostí s ním má komunikovat. Proto je třeba ještě další signál k resetování obvodu (běžně se používá RTS sériového portu).
To představuje maličký problém: převodník MAX232 totiž má pouze dvě linky RS232 → UART (a naopak dvě UART → RS232). My ale potřebujeme pro směr RS232 → UART. Některé zapojení použijí tranzistor, já jsem se rozhodl vzít ze šuplíku optopřevodník 6N136. Celé zapojení vypadá takto:
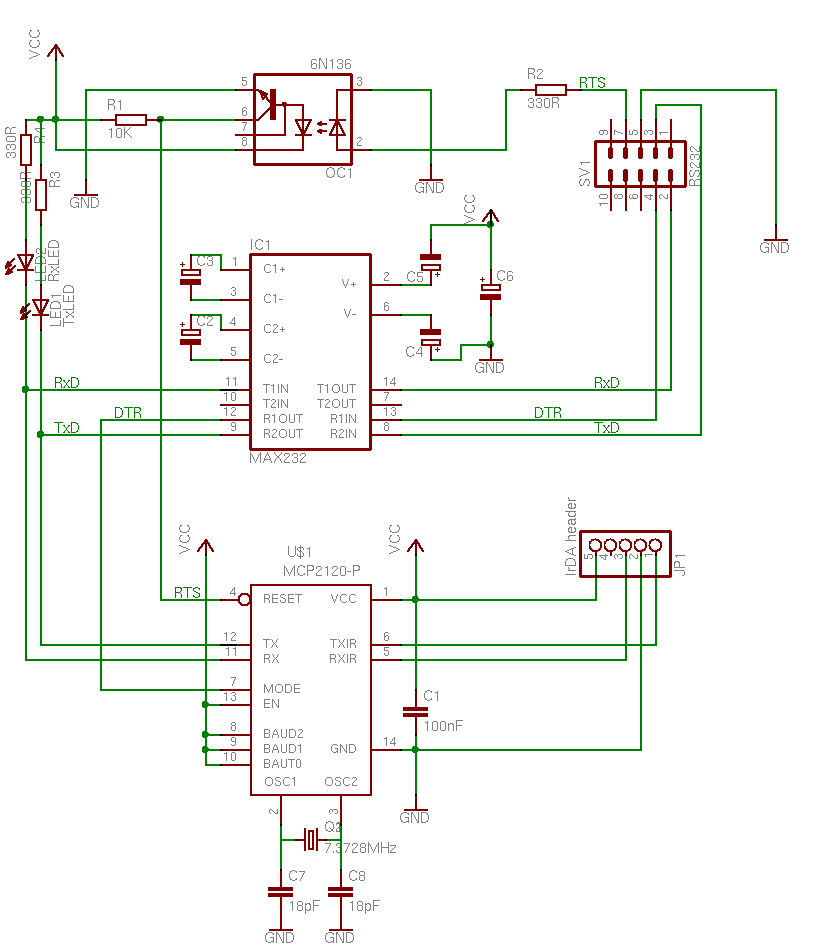
Na schématu není zakresleno napájení, já se rozhodl napájet přímo z +5V větve ze zdroje. Ovšem raději jsem předřadil jednu „vratnou pojistku“ a přidal několik vyhlazovacích kondenzátorů (bez nich jsem si ani nešktl, to co „lítá“ po drátech uvnitře počítače bude docela divoké... :D ). Signály do vysílače/příjimače IrDA jsou vyvedeny na klasickou pinovou lištu ve standardním pořadí:
1 - TxIR 2 - GND 3 - RxIR 4 - n.c. 5 - +5V
Testování zapojení není složíté: na linky Rx a Tx jsem mezi MAX232 a MCP2120 pověsil dvě LED diody, takže je možné velmi dobře sledovat, kdo vysílá a kdo přijímá. Jelikož řídící mód funguje zároveň jako testovací a je aktivní při „nahozeném“ DTS, pak při spuštení terminálu, jakým je třeba minicom, se do takovéhoto testovacího módu dostaneme. To se projeví tím, že MCP2120 posílá všechny znaky zpět na UART. Pokud toto funguje, stačí IrDA nastavit a spustit. Konkrétně na mé Fedoře bude vypadat konfigurák (v /etc/sysconfig/irda) nějak takto:
IRDA=yes DEVICE=/dev/ttyS5 DONGLE=mcp2120 DISCOVERY=yes
Pak už jen service irda start a otestovat na nějakém zařízení (vřele doporučuji utiliktu irdadump)...

Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz