Max Leiter v roce 2019 zkusil zprovoznit X server na iPadu (iOS). Nyní se k tématu vrátil a s pomocí LLM a balíčkovacích nástrojů Procursus rozběhl desktop s X11 i Waylandem. Jeho balíčky jsou dostupné v repozitáři xiOS.
Společnost Google Cloud dnes oznámila, že její infrastruktura a služby byly oficiálně zařazeny do Katalogu cloud computingu vedeného Digitální a informační agenturou (DIA). Tato certifikace potvrzuje, že infrastruktura a služby Google Cloud splňují přísné bezpečnostní a regulační požadavky České republiky pro provoz cloudových služeb ve veřejném sektoru.
Vůbec poprvé v historii se stát při testování digitálních služeb obrací na širokou veřejnost. Digitální a informační agentura (DIA) a Ministerstvo vnitra zvou občany k zapojení do zátěžového testu eDokladů, které od loňského podzimu prošly optimalizací aplikace a posílením infrastruktury. Test proběhne 13. srpna ve 13:00 a pro jeho úspěch bude potřeba zapojení několika desítek tisíc občanů. Zapojení do testu je zcela dobrovolné a úkol
… více »FireDragon je webový prohlížeč, doposud založený na Floorpu, jednom z forků Firefoxu s větším důrazem na ochranu soukromí a přizpůsobení uživatelského rozhraní. Spravuje ho člen komunity distribuce Garuda Linux. Nové vydání verze 13 opouští Floorp a přechází přímo na Firefox s patchi z LibreWolfu a vlastními úpravami. Dostupný je také na Flathubu.
picogame (GitHub) je malý 2D herní engine pro mikrokontroléry jako RP2040, čip uvnitř kapesní konzole Picopad. Hru napíšeš v Pythonu a vyzkoušíš ji v prohlížeči nebo desktopovém simulátoru. Až bude hotová, zkopíruješ ji na podporovanou desku. Na začátku nepotřebuješ C, sestavení firmwaru ani hardware.
Multiplatformní prohlížeč elektronických knih KOReader byl vydán ve verzi 2026.07 "Sailing Walrus". U PDF souborů s SMask lze vyčistit pozadí. Přibyla podpora Kobo v5 nebo základní podpora OPDS 2.0.
Společnost Valve sponzoruje a společnost Collabora portuje RADV (open source Vulkan ovladač pro AMD GPU z projektu Mesa) na Windows.
Starling (GitHub) je desktopové prostředí vytvořeno umělou inteligencí (s dohledem jednoho vývojáře během šesti měsíců).
Dne 30. června 2026 byla završena fyzická realizace projektu Czech National Quantum Communication Infrastructure (CZQCI), tedy České národní kvantové komunikační infrastruktury. Projekt byl realizován od 1. března 2023 a financován z Národního plánu obnovy částkou 121,6 milionu Kč. Cílem podpořeného projektu bylo vybudovat základy národní kvantové komunikační infrastruktury a ověřit možnosti jejího praktického využití. Mezi
… více »Město Šumperk se stalo terčem kybernetického útoku, chod úřadu je omezen. Zjišťuje se, jestli unikla nějaká data. Cílem hackerů byla městská datová síť. První útoky zaznamenali odborníci na informační technologie již v pondělí večer, závady se ale plně projevily až dnes ráno. Město událost nahlásilo Národnímu úřadu pro kybernetickou a informační bezpečnost (NUKIB).
První hračka k ničemu postavená na Arduino! Joj!
Proč co? Proč Arduino! Arduino je velmi zajímavá platforma určená především lidem kteří nemají rádi programování a nerozumí hardwaru (tedy mě  ). Hodí se pro opravdovou spoustu projektů, od svítících kravat, po roboty. Hlavní výhoda Arduina je, že jakmile vás napadne ta největší blbina na světě, kterou určitě nikdo neudělal, většinou už to někdo udělal, a co víc - udělal na to i návod! A nejlepší na tom je, že většinu věcí stihnete za odpoledne. A co si dneska zkusíme? Nicnedělající tlačítkový ovladač serva!
). Hodí se pro opravdovou spoustu projektů, od svítících kravat, po roboty. Hlavní výhoda Arduina je, že jakmile vás napadne ta největší blbina na světě, kterou určitě nikdo neudělal, většinou už to někdo udělal, a co víc - udělal na to i návod! A nejlepší na tom je, že většinu věcí stihnete za odpoledne. A co si dneska zkusíme? Nicnedělající tlačítkový ovladač serva!
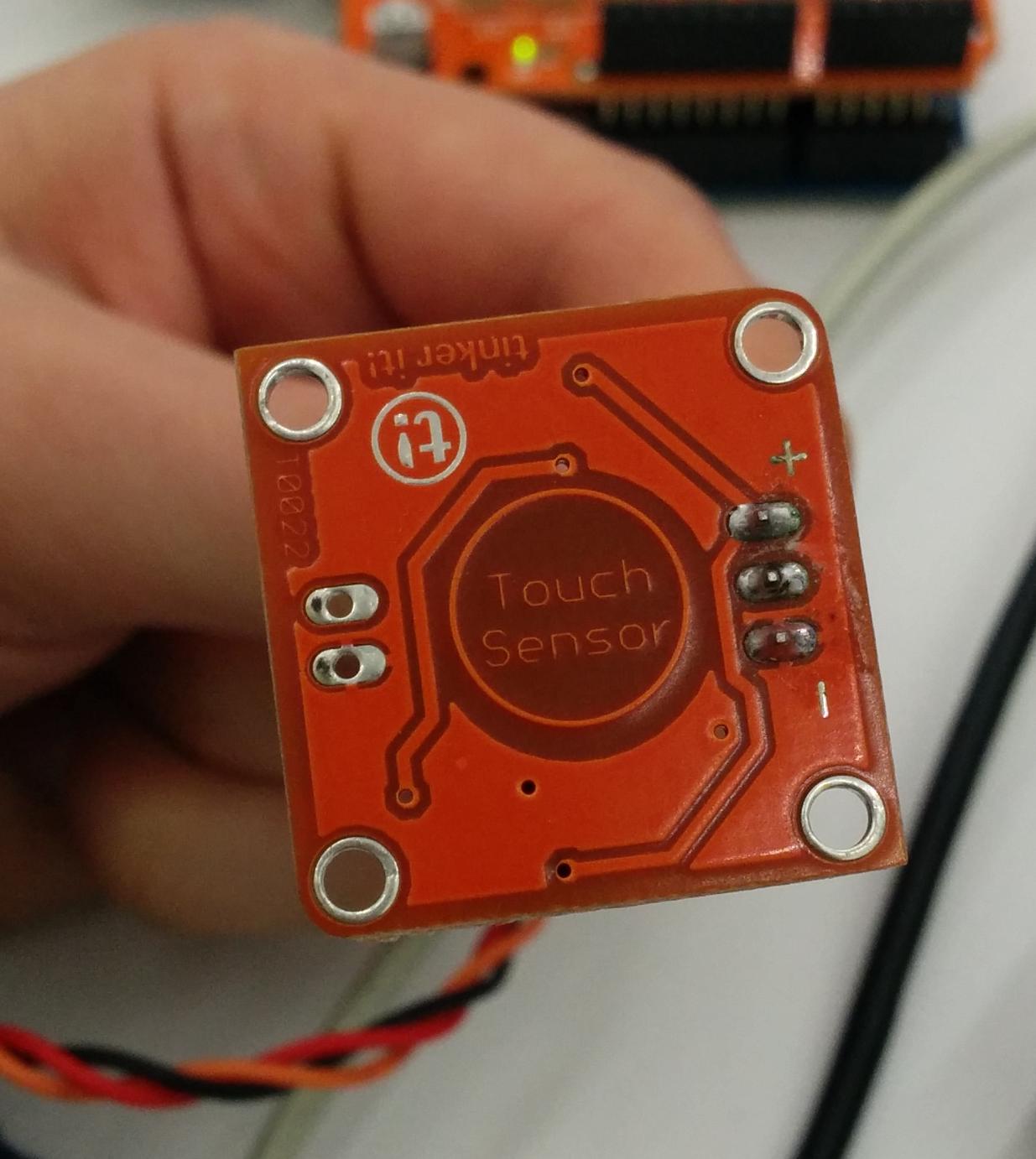
Nic! Teda skoro nic. Základní myšlenka je dokázat na kliknutí servo spustit, na další kliknutí servo zastavit a dalším klikem jej zase spustit opačným směrem - tedy něco co by se dalo použít například na ovládání spouštění žaluzií. A teď už se podíváme na samotný kód.
#include <Servo.h> // knihovna pro ovladani servo motorku
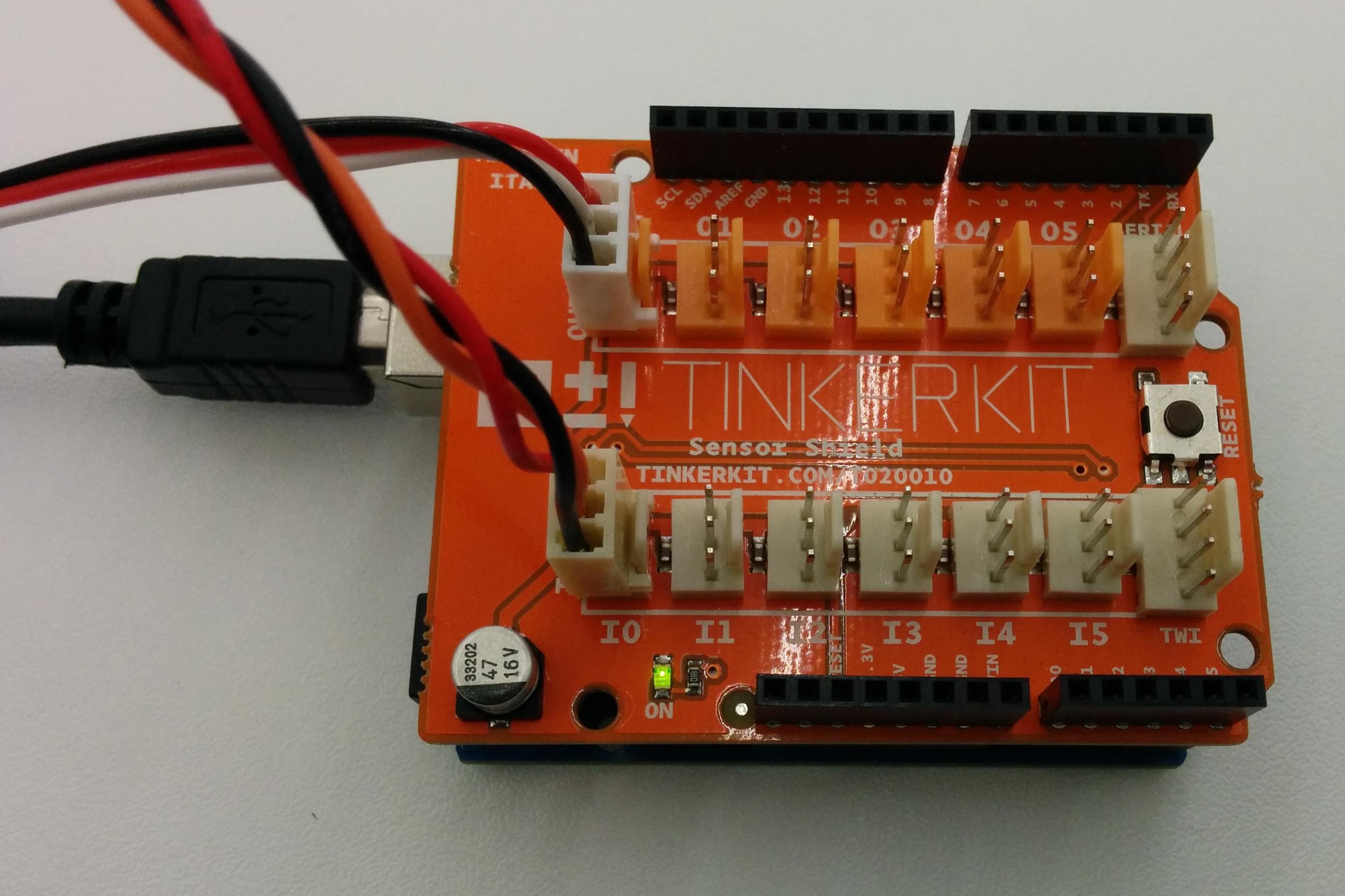
#include <TinkerKit.h> // knihovna umoznujici pouziti TinkerKit shieldu
TKTouchSensor touch(I0); // dotykove cidlo
Servo myservo; // servo
int arr[4] = {0, 90, 180, 90}; // 0 - doprava, 90 - vypnout, 180 - doleva
int arr_size = 4; // nemam rad cecko
int i = 0; // fakt
void setup()
{
myservo.attach(O0); // pripojeni serva na pin O0 (TinkerKit piny)
myservo.write(90); // pocatecni nastaveni serva na vypnuto
Serial.begin(9600); // testovaci vystup na seriovem portu
}
void loop()
{
if (touch.pressed() == 1) {
if(i<arr_size){
myservo.write(arr[i]);
} else {
i = 0;
myservo.write(arr[i]);
}
i++;
}
delay(25);
}
S Arduinem dělám už více než den a zatím je to fakt legrace. Zatím jsem měl k dispozici jen školní kity, s celkem omezenými periferiemi (proto nicnedělající servo - druhou věc co jsem si z legrace postavil bylo světlo ovládané teplotou v místnosti...). Co bych si chtěl sám pro sebe postavit je teplotní/vlhkostní/světelné čidlo odesílající data na web, abych si mohl dálkově kontrolovat teplovzdušné topení na chatě, tedy něco jako tady. Zatím přemýšlím, co všechno budu potřebovat, a na kterém typu Arduina to postavím - zatím vítězí kombinace Uno + Ethernet shield, nejspíše to koupím na dhgate, kde to i s poštovným vyjde na cca 30 USD. Uvažoval jsem o Arduino Yún, ale ten mi vzhledem k tomu, že má navíc akorát wifi kterou stejně nevyužiji a stojí 52 EUR, což už mi přijde trochu moc.
A co vy? Stavíte si gadgety na Arduinu? Mátě nějaké nápady jak provést to tepelné čidlo (zatím mám jen 2x 100K termistor, takže jsem opravdu na začátku)? A nakonec bych chtěl poděkovat Josefu Průšovi a Štěpánu Bechynskému za rychlý úvod do světa Arduina!
EDIT: Lehké shrnutí rozdílu mezi Raspberry PI a Arduino tu.

Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 15.12.2013 17:22
mirec | skóre: 32
| blog: mirecove_dristy
| Poprad
15.12.2013 17:22
mirec | skóre: 32
| blog: mirecove_dristy
| Poprad
Tak trochu offtopic, chcel by som rozbehať jeden krokový motorček a mať možnosť používať ho v teréne (z li-po bateriek). Bateriek mám dosť, ARM mi utiahnu (3.3V napájanie), ale krokový motor ide na 24V (záťaž bude minimálna, takže otočí ho aj na menšom napätí). Problém je ako vyrobiť z li-po baterky 24V. Premýšľal som nad niečim takýmto. Skúšal to niekto?
 15.12.2013 17:35
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
16.12.2013 07:40
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
15.12.2013 17:35
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
16.12.2013 07:40
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
 15.12.2013 23:45
Jendа | skóre: 78
| blog: Jenda
| JO70FB
15.12.2013 23:45
Jendа | skóre: 78
| blog: Jenda
| JO70FB
Zatím přemýšlím, co všechno budu potřebovat, a na kterém typu Arduina to postavím - zatím vítězí kombinace Uno + Ethernet shield, nejspíše to koupím na dhgate, kde to i s poštovným vyjde na cca 30 USD.Co RPi? Vyjde ani ne o polovinu víc a HW je nesrovnatelný.
 16.12.2013 03:13
Gilhad | skóre: 20
| blog: gilhadoviny
16.12.2013 03:32
Jendа | skóre: 78
| blog: Jenda
| JO70FB
16.12.2013 03:13
Gilhad | skóre: 20
| blog: gilhadoviny
16.12.2013 03:32
Jendа | skóre: 78
| blog: Jenda
| JO70FB
 16.12.2013 07:09
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
16.12.2013 08:17
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
16.12.2013 07:57
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
16.12.2013 07:09
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
16.12.2013 08:17
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
16.12.2013 07:57
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
 16.12.2013 19:48
Dreit | skóre: 15
| blog: Dreit a jeho dračí postřehy
| Královehradecký kraj
16.12.2013 19:48
Dreit | skóre: 15
| blog: Dreit a jeho dračí postřehy
| Královehradecký kraj
Realtime na RPi se údajně řeší přes DMA
16.12.2013 08:01
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
16.12.2013 18:56
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
16.12.2013 21:58
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
20.12.2013 18:34
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
 16.12.2013 12:58
Petr Tomášek | skóre: 39
| blog: Vejšplechty
16.12.2013 12:58
Petr Tomášek | skóre: 39
| blog: Vejšplechty
fungujici kod -> zjistim jak to fungujenez
zjistim jak to funguje -> fungujici kodAle je to jen muj nazor.
16.12.2013 13:33
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
Arduino je "prototyping platform" pro lidi co neví co je to AVR...
18.12.2013 11:38
Petr Tomášek | skóre: 39
| blog: Vejšplechty
Tak přesně pro tebe Arduino není
Nepájivé konktaktní pole je daleko lepší „prototyping platform“ 
....pro lidi co neví...
Přesně tohle mě uráží . Nenávidím věci „pro lidi, co neví...“ (a jsou líní/blbí na to, aby si to nastudovali).
18.12.2013 21:34
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
 Ale taky se mi moc nelibi, ze je arduino neco jineho nez jen AVR na desticce (to GUI a lib k tomu). Zavrhuju i ostatni IDE k AVR, neni nad vim a gcc.
19.12.2013 16:13
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
20.12.2013 00:28
Gilhad | skóre: 20
| blog: gilhadoviny
20.12.2013 11:44
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
22.12.2013 15:01
Petr Tomášek | skóre: 39
| blog: Vejšplechty
24.12.2013 19:41
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
Ale taky se mi moc nelibi, ze je arduino neco jineho nez jen AVR na desticce (to GUI a lib k tomu). Zavrhuju i ostatni IDE k AVR, neni nad vim a gcc.
19.12.2013 16:13
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
20.12.2013 00:28
Gilhad | skóre: 20
| blog: gilhadoviny
20.12.2013 11:44
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
22.12.2013 15:01
Petr Tomášek | skóre: 39
| blog: Vejšplechty
24.12.2013 19:41
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
 17.12.2013 16:01
Luboš Doležel (Doli) | skóre: 98
| blog: Doliho blog
| Kladensko
17.12.2013 16:01
Luboš Doležel (Doli) | skóre: 98
| blog: Doliho blog
| Kladensko
int arr_size = 4; // nemam rad ceckoAle fuj... to se dá udělat takhle: #define array_size(array) (sizeof(array)/sizeof(array[0]))
17.12.2013 19:04
pools | skóre: 19
| blog: Svědek Damdogův
| Opava/Praha
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz 16.12.2013 20:38
16.12.2013 20:38