Společnost Valve sponzoruje a společnost Collabora portuje RADV (open source Vulkan ovladač pro AMD GPU z projektu Mesa) na Windows.
Starling (GitHub) je desktopové prostředí vytvořeno umělou inteligencí (s dohledem jednoho vývojáře během šesti měsíců).
Dne 30. června 2026 byla završena fyzická realizace projektu Czech National Quantum Communication Infrastructure (CZQCI), tedy České národní kvantové komunikační infrastruktury. Projekt byl realizován od 1. března 2023 a financován z Národního plánu obnovy částkou 121,6 milionu Kč. Cílem podpořeného projektu bylo vybudovat základy národní kvantové komunikační infrastruktury a ověřit možnosti jejího praktického využití. Mezi
… více »Město Šumperk se stalo terčem kybernetického útoku, chod úřadu je omezen. Zjišťuje se, jestli unikla nějaká data. Cílem hackerů byla městská datová síť. První útoky zaznamenali odborníci na informační technologie již v pondělí večer, závady se ale plně projevily až dnes ráno. Město událost nahlásilo Národnímu úřadu pro kybernetickou a informační bezpečnost (NUKIB).
Samba, svobodná implementace síťového protokolu SMB/CIFS, byla vydána ve verzích 4.24.5, 4.23.10 a 4.22.11. Řešeno je 6 zranitelností.
Přední technologické společnosti (Adobe, Cadence, Capital One, Cisco, Cloudera, Cloudflare, Cognition, CrowdStrike, Databricks, Dell Technologies, DoorDash, Elastic, HPE, Hugging Face, IBM, LangChain, Linux Foundation, Microsoft, NAVER, NetApp, Nous Research, NVIDIA, OpenClaw, Palantir, Palo Alto Networks, Red Hat, Reflection AI, Salesforce, SAP, ServiceNow, Siemens, SK Telecom, Snowflake, SpacexAI, Synopsys, Thinking
… více »Krabix.cz je online 3D konfigurátor krabiček pro 3D tisk s exportem do STL. Běží přímo v prohlížeči. Nic se neposílá na server.
Nadace Open Home Foundation spustila veřejnou preview verzi komunitní databáze zařízení pro Home Assistant. Má fungovat jako „Wikipedie pro chytrá zařízení".
Na stránce nového panelu Firefoxu přibudou nové widgety. Například denně aktualizována interaktivní křížovka.
PGSimCity (GitHub) je webová 3D vizualizace vnitřního fungování databázového systému PostgreSQL v podobě města. Vytvořena pomocí umělé inteligence.
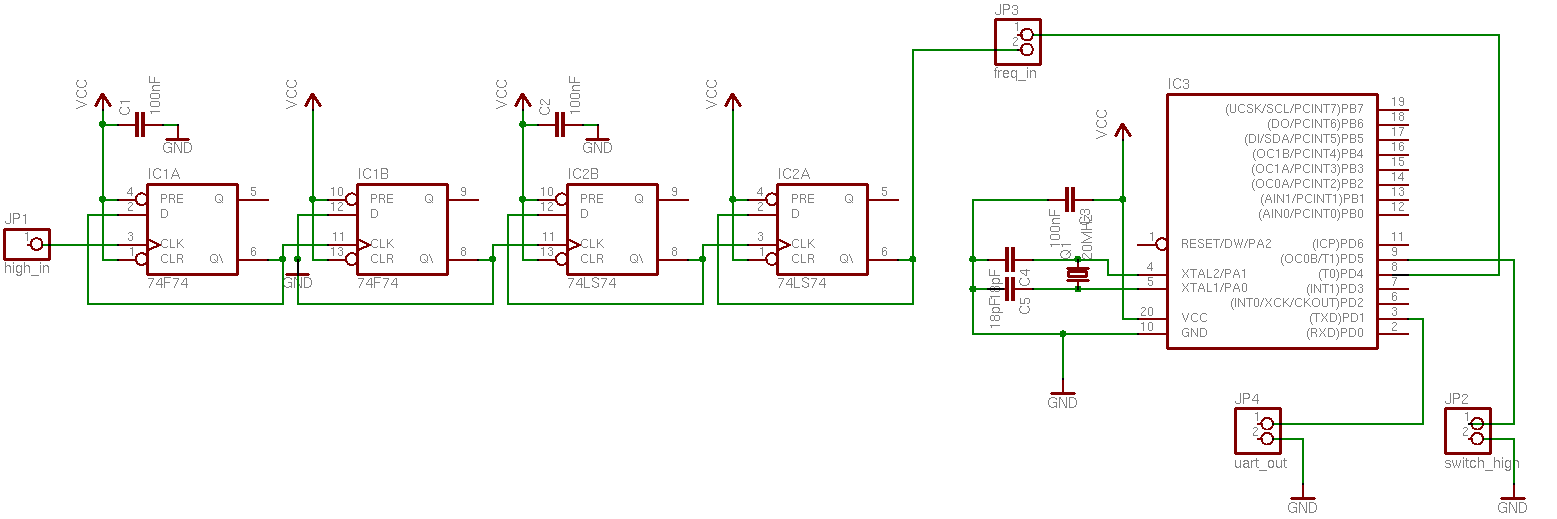
Tak jsem jednou potřeboval přibližně změřit frekvenci krystalového oscilátoru a jelikož žádný přístroj k tomuto účelu uzpůsobený nevlastním, rozhodl jsem se udělat malé udělátko s pomocí běžného AVR ze šuplíku. Nějakým zobrazováním jsem se netrápil, data prostě házím pěkně na sériový port a čtu z počítače. Vzhledem k tomu, že frekvence, kterou jsem měřil několikrát převyšovala maximální pracovní frekvenci AVR-ka, bylo nutné předřadit ještě děličku frekvence.
K zbastlení jsem použil profláklý ATtiny2313. Napsat firmware bylo poměrně triviální, neboť tento jednočipu má již v sobě hardwarovou čítačku impulzů. Chceme-li měřit frekvenci, je samořejmě nutné vědět, za jaký časový úsek impulzy počítáme. K tomu použijeme druhý čítač, který bere svůj takt ze systémového oscilátoru (v našem případě 20MHz krystal). Každou sekundu spočítame počet impulzů a dostaneme tak frekvenci. (Pro rýpaly, samozřejmě přesnost měření závisí na přesnosti použitého krystalu. Jelikož ale bylo cílem zjistit jen, zda-li měřený krystalový oscilátor funguje a nikoliv žádné přesné měření, tato přesnost nám bohatě stačí.)
Bohužel oscilátor, který jsem potřeboval ověřit, měl frekvenci 48MHz, ATtiny2313 však dokáže měřit frekvenci maximálně do poloviny pracovní frekvence - a to ještě při 50%/50% střídě. Čili reálně vychází tak 7-8MHz maximální frekvence, kterou jsme schopni rozumně změřit. Bylo tedy jasné, že potřebujeme frekvenci rozdělit. Bohužel jsem v šuplíku žádný dělič frekvence nenašel. Naštěstí se v něm ale povalovaly obvody 74F74 a 74LS74, což jsou klopné obvody typu D, z nichž už takovou děličku (=čítač) sestrojit lze. Měl jsem štestí, neboť obvod 74F74 zvládne až cca 125MHz a 74LS74 až asi 30MHz. Tím se dostáváme k maximální frekvenci něco přes 100MHZ (první obvod rozdělí frekvenci dvakrát na ~25MHz a druhý na cca 6.3MHz, kterou už AVR hravě zvládne.) Firmware jsem vylepšil tak, že je možné jedním vstupním pinem rozhodnout, zda-li AVR dostane již rozdělenou frekvenci (v poměru 1:16) a případně ji sám tímto poměrem vynásobí a zobrazí skutečnou frekvenci.
Výsledek měření je vypsán na UART (součásti zapojení není převodník na RS232, doporučuji tento článek) rychlostí 57600 (8N1).
Projekt je možné stáhnout zde. Aktualizace: opravená verze tady.
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 13.8.2008 00:22
Petr Tomášek | skóre: 39
| blog: Vejšplechty
13.8.2008 00:22
Petr Tomášek | skóre: 39
| blog: Vejšplechty
uart_print_freq() pravděpodobně občas zablbne, pokud program poběží dost dlouho. Může se totiž stát, že hodnota freq se změní mezi vyhnodnocením podmínky a přiřazením do temp.
(Dobrá, asi se to nestane, protože vypsání proběhne jenom po změně status a je rychlejší, než jedna vteřina.)
- status by měla být deklarována jako volatile. Když není, tak u gcc-3.4 to projde - nevím proč, ta proměnná by pro ten překladač neměla měnit hodnotu a optimalizace by její testování měla odstranit.
U gcc-4.3 už to ale neprojde, když je proměnná nulová, program skočí na instrukci rjmp -2, což je nekonečná smyčka.
13.8.2008 12:41
Petr Tomášek | skóre: 39
| blog: Vejšplechty
Ještě nějaké detaily:
- SIGNAL() je deprecated, místo něj se má použít ISR()
...
- status by měla být deklarována jako volatile. Když není, tak u gcc-3.4 to projde - nevím proč, ta proměnná by pro ten překladač neměla měnit hodnotu a optimalizace by její testování měla odstranit.
OK, tyhle věci opraveny, díky.
volatile proměnnou větší než 8 bitů, tak tam vidí po sobě jdoucí instrukce načítání z paměti:
lds r24, 0x0060 lds r25, 0x0061 lds r26, 0x0062 lds r27, 0x0063Přitom když je ta proměnná volatile, tak to znamená, že se obsah té paměti během vykonávání těch instrukcí může změnit a do registrů se pak načte naprosto nesmyslná hodnota - napůl stará, napůl nová. Podle mě by to mělo být takhle:
in r23, SREG cli lds r24, 0x0060 lds r25, 0x0061 lds r26, 0x0062 out SREG, r23 lds r27, 0x0063obecně nebo
cli lds r24, 0x0060 lds r25, 0x0061 lds r26, 0x0062 sei lds r27, 0x0063v případě, že vím, že přerušení bylo předtím povoleno.

register uint32 tmp; ... cli(); tmp = freq; sei(); uart_print_freq(tmp); ...Akorát je docela opruz tohle psát u každého přístupu k té proměnné a vygenerovaný kód není úplně optimální. Přitom by určitě bylo jednodušší, kdyby gcc pro AVR vypínal/zapínal přerušení automaticky (i když to zas narážíme na otázku, jestli by byl schopen to dělat efektivně)
14.8.2008 16:07
Petr Tomášek | skóre: 39
| blog: Vejšplechty
Akorát je docela opruz tohle psát u každého přístupu k té proměnné...Mno, v tom případě přeci není problém připravit drobné makro, ne? Něco jako:
#define get_volatile(x,y) cli();x=y;sei()
To by vnaselo do jazyka zmatek a zhorsilo prenositelnost kodu.Přenositelnost kódu by to asi zhoršilo, jenom nevím, kam by mělo smysl přenášet kód z AVR (pokud to má dělat něco užitečného, polovina kódu je specifická pro architekturu a jinde se nepřeloží)
 15.8.2008 10:51
Josef Kufner | skóre: 70
15.8.2008 10:51
Josef Kufner | skóre: 70
Jde hlavně o princip.To jsem si všiml
Ale představ si, že za rok vyrobí trochu jiný model a ty budeš chtít program přenést na něj a zrovna tohle tam bude trošku jinak...Nový model se objevuje každou chvíli a všechny mají stejný vnitřek - jádro AVR. A stále nevidím žádný problém - kdyby se náhodou objevil model, kde by tohle bylo jinak (což si teda opravdu představit nedokážu, jak by se v jednočipu musel změnit přístup k paměti, aby to mohlo být jinak), tak by se prostě ten přepínač při překladu programu pro ten nový model zakázal.
15.8.2008 12:48
Josef Kufner | skóre: 70
avr-gcc --neprerusitelne-volatile), tzn. po překladu by se to buď používalo v celém výsledku, nebo nepoužívalo v celém výsledku.
16.8.2008 04:16
Josef Kufner | skóre: 70
A teď si představ jaký bordel v tom bude a nakonec to skončí tak, že jeden kus kódu budeš muset ručně projít a upravit.Proč? Jediné, co se hlídá, je zablokování přerušení na dobu přístupu k proměnné. Jestli to zajišťoval překladač nebo makro je jedno, protože podstatné je, že ten přístup je ochráněn. Víc nepotřebuju. (Ano, je tu záležitost, že se zapnutým přepínačem by ten kód byl chráněn dvakrát. Nicméně mám důvěru v autory toho překladače, že jsou schopni vytvořit takové optimalizace, které odhalí dvě stejné instrukce za sebou a tu jednu vyhodí.) Co chci říct, že kdyby byla vůle, tak by to pravděpodobně šlo vyřešit nějak automaticky i s možnými problémy okolo.
16.8.2008 14:23
Petr Tomášek | skóre: 39
| blog: Vejšplechty
http://www.abclinuxu.cz/blog/vejsplechty/2008/8/www.etf.cuni.cz/~tomasek/avr_freq_0.1.tgz a pravděpodobně by mělo být www.etf.cuni.cz/~tomasek/avr_freq_0.1.tgz.
13.8.2008 12:09
Petr Tomášek | skóre: 39
| blog: Vejšplechty
 . Sry, už je opraveno...
13.8.2008 21:48
Josef Kufner | skóre: 70
Ale jinak je to hezké a roztomilé
. Sry, už je opraveno...
13.8.2008 21:48
Josef Kufner | skóre: 70
Ale jinak je to hezké a roztomilé
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz