Jean-Baptiste Kempf na svém blogu představil novou verzi 9.0 "Lei" kolekce svobodného softwaru umožňujícího nahrávání, konverzi a streamovaní digitálního zvuku a obrazu FFmpeg (Wikipedie).
Richard Hughes oznámil, že službu Linux Vendor Firmware Service (LVFS) umožňující aktualizovat firmware zařízení na počítačích s Linuxem, nově sponzoruje také společnost NVIDIA.
Edvard Rejthar na blogu zaměstnanců CZ.NIC představil svou aplikaci SlideRshow (GitHub). Funguje jako prohlížeč fotek, ale i jako jejich organizér a prezentátor. Neinstaluje se, běží přímo v prohlížeči. Bez serveru. Offline.
Kermit, tj. protokol pro přenos souborů, vznikl před 45 lety. Při této příležitosti byla po 15 letech od vydání poslední stabilní verze 9.0.302 vydána nová stabilní verze 11 implementace C-Kermit. S podporou IPv6.
První verze konverzního nástroje Pandoc byla vydána před 20 lety. Jeho autor John MacFarlane při tomto výročí rekapituluje jednotlivé etapy vývoje a přidávání nových funkcí – rozšíření nejen Markdownu a podporu mnoha dalších formátů.
Srpen přinesl nejen další spalující vedro, ale také Virtuální Bastlírnu s neméně žhavými novinkami. Využijte tedy předpovědi na deštivý čtvrteční večer a od 20:00 se připojte online k tomuto neformálnímu setkání kutilů, techniků a vědců, kde se strahovskými bastlíři proberete nejzajímavější věci, na které jste narazili za poslední měsíc. Pokud jde o novinky, řeč zcela jistě přijde na systém INDX pro tiskárny Průša, který na konci
… více »Firma T-Mobile blokovala „dezinformační web“ AC24 bez toho, aniž by k tomu měla závazný pokyn orgánů veřejné moci. Píše to ve svém rozsudku Městský soud v Praze, který po čtyřech letech uzavřel kauzu blokace zmíněného webu. Operátor musí uhradit škodu ve výši 35 tisíc korun. Advokát společnosti T-Mobile se snažil i u odvolacího senátu argumentovat tím, že firma jednala v dobré víře, když na stránky omezila přístup poté, co ji k tomu vyzvalo
… více »Padla obžaloba v bitcoinové kauze. Státní zástupkyně chce pro Blažka 6,5 roku vězení, pro Titze 8 let.
Z aktuálních globálních statistik společnosti Statcounter: na desktopu má Linux celosvětově podíl 7,53 % (USA 11,92 %, Česko 4,31 %, Slovensko 4,36 %) a Firefox celosvětově podíl 6,51 % (USA 10,86 %, Česko 11,07 %, Slovensko 13,61 %).
Na GitHubu byl publikován seznam 55 kritických bezpečnostních chyb v SQLite s přiřazenými CVE čísly. JFrog Security informuje, že se jedná jenom o AI slop, části kódu na které CVE odkazují, v daných verzích vůbec neexistují. Upozorňuje také, že čísla CVE jsou přiřazována bez ověřování.
Mám laserový vychylovací systém podobný tomuto. Zrcátka jsou navzájem kolmá, takže umožňují vychýlení paprsku v navzájem kolmých osách. Motory jsou skrze zpětnou vazbu řízené napětím, kdy napětí přesně odpovídá úhlu natočení zrcátka.
Problém je v tom, že promítám na rovinu a ne na kulovou plochu, navíc pod úhlem. Potřeboval bych tedy určit transformaci souřadnic na promítané ploše na ovládací napětí - tzn. zjistit potřebný úhel natočení obou zrcátek pro zaměření souřadnic na ploše promítání. Při nulové výchylce zrcátek paprsek míří do středu promítané plochy.
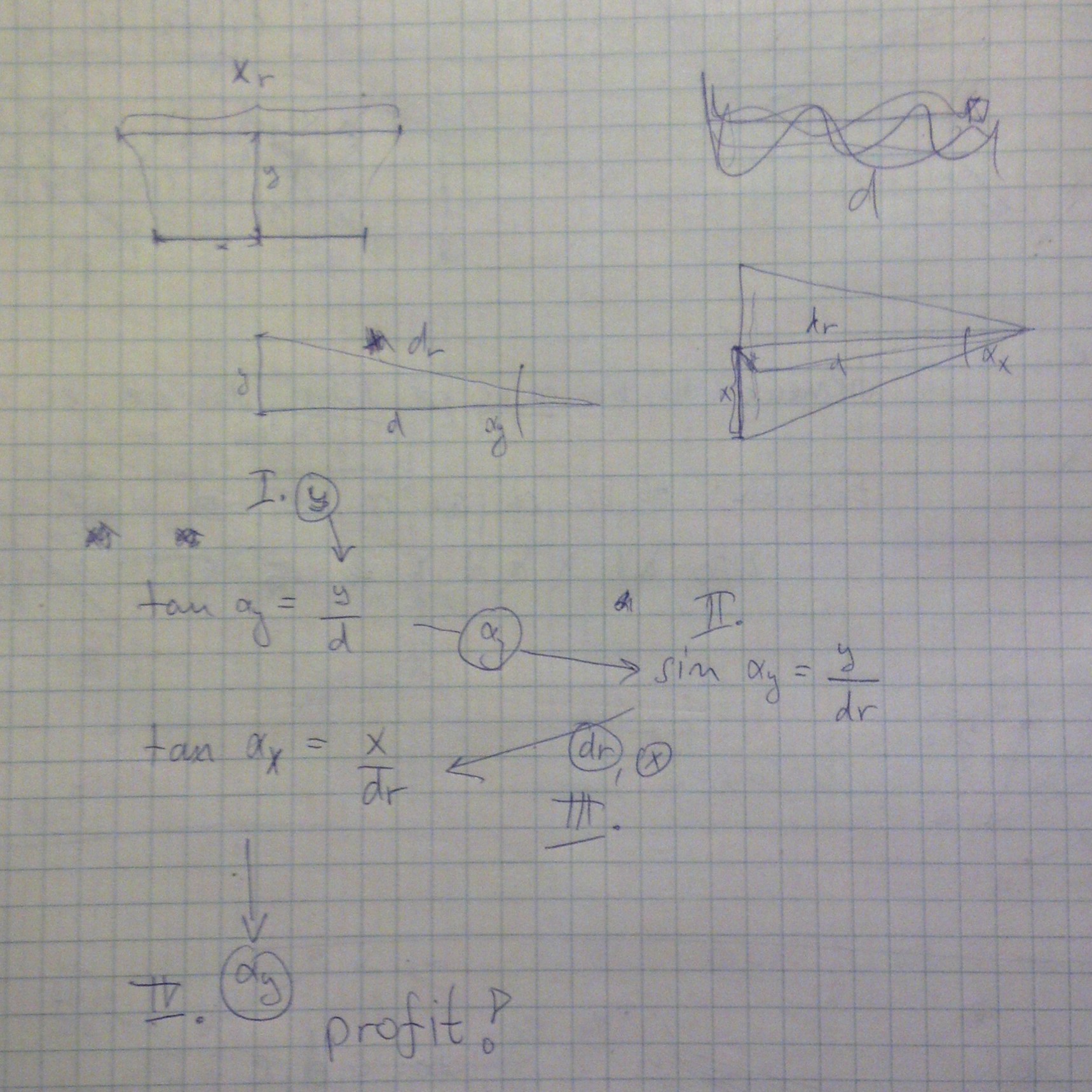
Jde o to, že pohyb v ose X ovlivňuje osa Y a naopak - pokud promítám bez korekce, souřadnice jsou nelineárně zkreslené - přímky jsou křivé, vzdálenosti nesedí atd. Bohužel zaboha nemužu přijít na to, jak tohle spočítat. Pro speciální případ - body na ose X a Y je transformace jednoduchá a funguje: uhel = atan2(rozmer, vzdalenost projektoru).
To ale nestačí, potřebuju mít přesně všechny body. Znám vzdálenost projektoru od plochy a souřadnice bodu na ploše, vzdálenost zrcátek uvnitř hlavy zatím zanedbám.
Zkoušel jsem už hromadu ruzných řešení ruzně najitých po netu a nic z toho mi nefungovalo, jediné co vypadá slibně je tohle ale tomu vubec nerozumím.
V podstatě mám souřadnicemi dané 2 úhly - jeden který svírá paprsek proti středové ose promítání a pak úhel, který svírá spojnice středu plochy proti bodu daném souřadnicemi. Potřebuju nějakou funkci, která úhel paprsku rozloží úhlem souřadnic na úhly natočení zrcátek. To mi nikdo zatím nezodpověděl - jakým způsobem se skládají a rozkládají úhly do jiných rovin. Vím, že vektor jde rozložit podle úhlu do navzájem kolmých složek, ale jak totéž udělat s úhlem rozkládaným jiným úhlem mi uniká.
Toto není školní úloha, o to víc je to pro mě dúležité. Děkuju komukoliv, kdo se mi pokusí pomoci 
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
Problém je v tom, že promítám na rovinu a ne na kulovou plochu, navíc pod úhlem.Takze "X Galvo" nemiri kolmo na promitaci plochu?
V podstatě mám souřadnicemi dané 2 úhly - jeden který svírá paprsek proti středové ose promítání a pak úhel, který svírá spojnice středu plochy proti bodu daném souřadnicemi. Potřebuju nějakou funkci, která úhel paprsku rozloží úhlem souřadnic na úhly natočení zrcátek. To mi nikdo zatím nezodpověděl - jakým způsobem se skládají a rozkládají úhly do jiných rovin. Vím, že vektor jde rozložit podle úhlu do navzájem kolmých složek, ale jak totéž udělat s úhlem rozkládaným jiným úhlem mi uniká.Priznam se, ze tenhle odstavec vubec nechapu. Takhle zatim rozumim tomu zadani: mas nejaky bod (x, y) na promitaci plose a chces najit natoceni "X Galvo" a "Y Galvo", aby paprsek dopadl na ten bod.
 30.1.2014 21:53
Jendа | skóre: 78
| blog: Jenda
| JO70FB
30.1.2014 21:53
Jendа | skóre: 78
| blog: Jenda
| JO70FB
Takze "X Galvo" nemiri kolmo na promitaci plochu?Nejspíš má nějaké problémy s geometrií. Proto bych si promítl mřížku, zaměřil skutečné souřadnice a aproximoval sítí.
Takhle zatim rozumim tomu zadani: mas nejaky bod (x, y) na promitaci plose a chces najit natoceni "X Galvo" a "Y Galvo", aby paprsek dopadl na ten bod.Řekl bych, že jo.
 30.1.2014 22:04
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:04
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
 Ale naklopeni projektoru je schvalne a da se nastavit mechanicky. Korekcni mapa je az uplne posledni moznost, potrebuju tam dostat realitu - vsechny potrebny vzdalenosti atd muzu celkem presne zmerit, ale kdyz si to neumim spravne odvodit, tak je mi to k nicemu.
30.1.2014 22:07
Jendа | skóre: 78
| blog: Jenda
| JO70FB
Ale naklopeni projektoru je schvalne a da se nastavit mechanicky. Korekcni mapa je az uplne posledni moznost, potrebuju tam dostat realitu - vsechny potrebny vzdalenosti atd muzu celkem presne zmerit, ale kdyz si to neumim spravne odvodit, tak je mi to k nicemu.
30.1.2014 22:07
Jendа | skóre: 78
| blog: Jenda
| JO70FB
 30.1.2014 22:00
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:15
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:39
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:48
Jendа | skóre: 78
| blog: Jenda
| JO70FB
d je vzdálenost projekční plohy, ay a ax jsou ty úhly.
30.1.2014 23:04
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:00
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:15
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:39
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:48
Jendа | skóre: 78
| blog: Jenda
| JO70FB
d je vzdálenost projekční plohy, ay a ax jsou ty úhly.
30.1.2014 23:04
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
Počkat, on to ten pincushion přeci jen bude.Pokud si to dobře pamatuju, tohle se v některých projektorech řeší asférickou čočkou, která je podobná běžné spojce, ale je uprostřed mnohem plošší než na okrajích, tudíž čím je paprsek dále od osy, tím více dovnitř se láme ve srovnání s normální sférickou čočkou (viz obrázek na této stránce o asférických čočkách, tedy až na to, že tam je asférická naopak a potlačuje soudkovitost).
a a b. Pokud a = pi/4 a b = pi/4, tak by paprsek mel smerovat do stredu (tzn. podobne jako na tom obrazku). Je samozrejme mozny, ze tam je nekde chyba, pravdepodobnost chyby odhaduju na 50% :) Ale postup by mel byt ok.
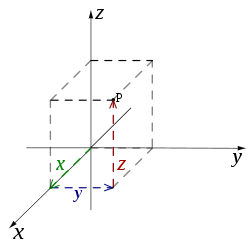
Pouzivam stejny system souradnic jako na tomhle obrazku.
Myslenka je jednoducha, pokud vim normalovy vektor roviny a smer dopadu paprsku, muzu spocitat vektor odrazu.
Vektor l1 (light 1) je vektor, ktery smeruje z mista dopadu na prvni zrcadlo ke zdroji.
l1 = [0, 1, 0]
n1 je normalovy vektor roviny prvniho zrcadla, normalizovany na delku 1.
n1 = [0, cos(a), sin(a)]
r1 je vektor odrazu paprsku od prvniho zrcadla, smeruje pryc od mista dopadu. Jak spocitat vektor odrazu je vysvetleno zde.
r1 = 2*(n1*l1)*n1 - l1 = [0, 2*cos(a)*cos(a) - 1, 2*sin(a)*cos(a)]
Normalovy vektor roviny druheho zrcadla:
n2 = [cos(b), 0, -sin(b)]
A l2 je totez co r2, jenom ma opacny smer:
l2 = -r1 = [0, 1 - 2*cos(a)*cos(a), -2*sin(a)*cos(a)]
Vektor odrazu od druheho zrcadla spocitam stejne jako pro prvniho zrcadla:
r2 = [4*sin(a)*cos(a)*sin(b)*cos(b), 2*cos(a)*cos(a) - 1, 2*sin(a)*cos(a) * (1-2*sin(b)*sin(b))]
Z vektoru r2, ktery smeruje na promitaci plochu, je ted potreba spocitat misto dopadu (projx a projy). Pokud mam vektor [x, y, z], tak projx = y/x a projy = z/x. Obe souradnice je jeste potreba vynasobit konstantou s podle vzdalenosti platna.
Takze:
projx = s * (2*cos(a)*cos(a)-1) / (4*sin(a)*cos(a)*sin(b)*cos(b))
projy = s * (2*sin(a)*cos(a)*(1-2*sin(b)*sin(b))) / (4*sin(a)*cos(a)*sin(b)*cos(b))
Pokud chces umet prevest projx a projy na a a b, tak je potreba resit soustavu dvou rovnic, coz jsem nezkousel, ale vypada to slozite.
a a b jsou natoceni X Galvo a Y Galvo, na obrazku jsou natoceny priblizne na 45 stupnu (pi/4 v radianech).
30.1.2014 22:42
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
a zafixuje na 45 stupnu, tak
y = (2*sin(a)*cos(a)*(1-2*sin(b)*sin(b))) / (4*sin(a)*cos(a)*sin(b)*cos(b))
jde podle wolfram alpha upravit na y = cotan(2*b).
y nám vyšlo stejně (akorát já uvažuju jinej úhel, proto tg místo cotg). Jestli vyšlo stejně i x už opravdu počítat nebudu. Dobrou noc
r2 (vektor paprsku smerujiciho na platno) wolfram alpha zjednodusil na [sin(2a) * sin(2b), cos(2a), sin(2a) * cos(2b)] Dobrou
alpha = 0.5 * acos(x / sqrt(x^2 + y^2 + 1))
beta = 0.5 * acot(y)
Pokud zafixuju x nebo y na 0, tak to dava stejny vysledky jako atan(uhel)/2. Alpha i beta jsou uhly 0 az 90, kdyz jsou oba 45, tak paprsek smeruje doprostred.
31.1.2014 08:01
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
31.1.2014 09:44
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
31.1.2014 12:45
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
Kdyz budu mit zrcatko jedne osy pevne a druhym budu otacet, delka pruvodice bude v kazdem bode jina a tim padem to nenakresli primku.To, že délka průvodiče je jiná, ještě neznamená, že to nevykreslí přímku. Když si vemeš do ruky laser, budeš jím svítit na zeď a budeš jim vodorovně otáčet, tak taky promítneš přímku, přestože dráha je v každým bodě jinak dlouhá. Jestliže se ti to opravdu chová tak, jak popisuješ, tak to znamená, že to tvoje zařízení neodpovídá tomu modelu na obrázku.
31.1.2014 20:24
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
30.1.2014 22:44
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
31.1.2014 20:09
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
Zadani je jasne - vypocitat uhly zrcatek tak, aby paprsek miril na bod zadany souradnicemi na rovine. Ted vubec neuvazuju vlastni zkresleni projektoru, protoze v realu se rozdilna vzdalenost zrcatek projevi mensi chybou, nez je velikost tecky laseru. Uvazuju idealni projektor, ktery promita idealne na kulovou plochu (krivkovy integral po kulove plose je linearni vuci uhlu).
Vzhledem k tomu, kolik lidi si na tom uz vylamalo zuby a vlastne mi nikdo zatim presne nerekl, jak to spravne je, nepovazuju tuhle ulohu za trivialni .
a vlastne mi nikdo zatim presne nerekl, jak to spravne je, nepovazuju tuhle ulohu za trivialniNo, kdyz ja dve hodiny neco (zdarma) pocitam a ty to odbydes ala "takhle to vyjit nemuze, nejak se mi to nezda", ani se neobtezujes to vyzkouset (natoz se zmyslet nad postupem reseni), tak clovek uplne ztrati chut se tim vubec zabyvat. Spocitej si to sam, kdyz ses tak chytrej, lituju toho ztracenyho casu
31.1.2014 22:39
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
Reagoval jsem na Ponkracuv koment, ze je spatne zadani. Me tvoje uplne posledni vysledny reseni vyslo taky, jinym zpusobem (uhel +-45 kolem 0) a zkousel jsem ho, ale nefungovalo a melo zminenou vadu s kulatyma primkama. Taky my vysly ruzny jiny vysledky, ktery taky nefungovaly.
1.2.2014 01:55
Jendа | skóre: 78
| blog: Jenda
| JO70FB
1.2.2014 05:22
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
Sry, tak jsem to vubec nemyslel.Jasne, neni problem, pocit ukrivdenosti uz vyprchal
31.1.2014 05:07
Jendа | skóre: 78
| blog: Jenda
| JO70FB
.
1.2.2014 01:58
Jendа | skóre: 78
| blog: Jenda
| JO70FB
1.2.2014 18:40
vlastikroot | skóre: 24
| blog: vlastikovo
| Milevsko
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}