HollowByte je zranitelnost typu Denial of Service (DoS) v kryptografické knihovně OpenSSL. Útočník může odesíláním škodlivého payloadu o velikosti pouhých 11 bajtů zaplnit paměť serveru. OpenSSL před ověřením dat vyhradí nepřiměřený blok paměti (až 131 KB). Server pak čeká na data, která nepřišla. Zranitelnost je opravena ve verzích OpenSSL 4.0.1, 3.6.3, 3.5.7, 3.4.6 a 3.0.21.
Ve španělské A Coruñě probíhá GUADEC 2026, tj. letošní konference vývojářů a uživatelů desktopového prostředí GNOME. Videozáznamy přednášek jsou k dispozici na YouTube.
Společnost Collabora ve spolupráci s Valve vyvíjí Holo Core, tj. port Arch Linuxu pro ARM64 procesory (AArch64), který bude pohánět VR headset Steam Frame. Pro testování Arch Linuxu pro AArch64 jsou k dispozici binární balíčky, zdrojové kódy i kontejner pro Docker nebo Podman.
Mikroprocesor Zilog Z80 byl oficiálně uveden na trh před 50 lety, tj. v červenci 1976. Výroba mikroprocesoru skončila v roce 2024.
Výzkumníci ze společnosti ESET objevili 11 zapomenutých UEFI shim zavaděčů, které byly podepsány společností Microsoft, a které umožňují útočníkům obejít ochranu UEFI Secure Boot na většině zařízení. Microsoft je zneplatnil (přidal jejich hash do databáze dbx) v rámci aktualizace Patch Tuesday dne 9. června 2026. Uživatelé Linuxu mohou databází aktualizovat pomocí LVFS. Ověřit zneplatnění zavaděčů lze pomocí skriptu uefi-dbx-audit. Jedná se o CVE-2026-8863 a CVE-2026-10797.
pico-usb-wifi je open source firmware pro Raspberry Pi Pico W, který jej promění v USB Wi-Fi adaptér. Po připojení k počítači se objeví jako zařízení USB CDC-NCM.
Americká společnost Google ze skupiny Alphabet bude muset podle nových požadavků Evropské unie umožnit společnosti OpenAI i dalším konkurentům v oblasti umělé inteligence (AI) a internetových vyhledávačů přístup ke svým službám. Ve svém rozhodnutí o tom včera informovala Evropská komise (EK). Opatření má zajistit dodržování pravidel, jejichž cílem je omezit v EU tržní sílu velkých technologických firem. Google s tím nesouhlasí.
… více »Nové verze webových prohlížečů Chrome a Firefox jsou vydávány každé 4 týdny. Aktuální verze Chrome je 150. Aktuální verze Firefoxu je 152. V březnu bylo oznámeno, že od září přejde Chrome na dvoutýdenní cyklus vydávání verzí. To by znamenalo, že Chrome v číslování verzí Firefox brzy přeskočí. Vývojáři Firefoxu proto také od září přecházejí na dvoutýdenní cyklus vydávání verzí. :-)
Microsoft Comic Chat (Wikipedie), tj. grafický IRC klient z devadesátek, který převáděl konverzace na IRC do podoby komiksových panelů, a který zpopularizoval font Comic Sans, je dnešním dnem open source. Zdrojové kódy jsou k dispozici na GitHubu pod licencí MIT.
Byla vydána (𝕏) nová verze 26.7 open source firewallové a routovací platformy OPNsense (Wikipedie). Jedná se o fork pfSense postavený na FreeBSD. Kódový název OPNsense 26.7 je Xenial Xenops. Přehled novinek v příspěvku na fóru.
Cílem tohoto seriálu je popsat základní principy GPS. Dozvíte se, na které záludnosti je třeba dát pozor při používání GPS přijímačů, jaká je dostupnost signálu a přesnost určení pozice. Konkrétní poznatky se vztahují k přijímači NAVILOCK 202U, který mi byl zapůjčen (tisíceré díky!). Některou z jeho variant lze pořídit za cca 1800 Kč. V článku je popsán způsob, jak tento přístroj zprovoznit pod Linuxem a jak číst a interpretovat data přicházející do USB portu.
Zkušenější programátor by po přečtení tohoto článku měl být schopen napsat obslužný software, který zpracovává informace o aktuální pozici, přesném čase, pozici družic a síle jejich signálu a současně ošetřit řadu běžných problémových situací. Dále jsou nastíněny postupy při přepočtu mezi různými souřadnicovými systémy používanými v geodézii a kartografii. Mnoho dalších informací je k dispozici na internetu a zájemcům doporučuji odkazy uvedené na konci.

GPS (Global Positioning System) je projekt, který umožňuje komukoli na povrchu planety Země zjistit své zeměpisné souřadnice. Ke své funkci využívá několika specializovaných družic, které ze svých oběžných drah vysílají směrem k Zemi signály v podobě elektromagnetických vln. Signál se (ve vakuu) šíří rychlostí cca 300 000 km/s. Družice jsou seřízeny tak, že všechny vyšlou signál v přesně definovaný okamžik (Einsteinovu teorii relativity ponechme stranou). Přijímač umístěný na Zemi vypočítá svou pozici na základě toho, s jakým zpožděním přijme signál z jednotlivých družic. Když přijmeme signál, tak nevíme, jak dlouho mu trvalo, než k nám dorazil. Známe pouze časové rozdíly. Tato koncepce se často označuje zkratkou TDOA (Time Difference of Arrival). Princip si lze snadno představit na situaci, která je znázorněna na následujícím obrázku.
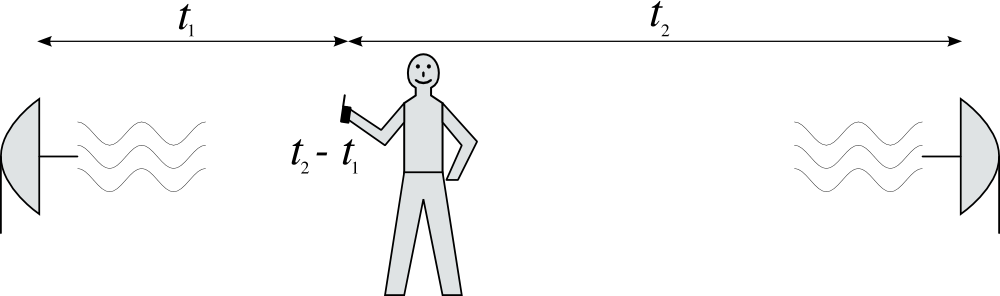
V jednorozměrném případě postačí k určení polohy dva vysílače (SVG).
Uživatel drží v rukou přijímač, který zaznamená signály ze dvou zdrojů s časovým rozdílem Δt=t2 - t1. Rychlost šíření signálu známe, a tak můžeme snadno vypočítat pozici přijímače vzhledem k vysílačům. Předpokládali jsme však, že vysílače i přijímač se nacházejí v přímce. Složitější situace nastane, když uvážíme, že se přijímač může nacházet kdekoli v rovině. V takovém případě již nelze jednoznačně určit pozici. Jediné, co můžeme s jistotou tvrdit, je to, že je přijímač umístěn v kterémkoli bodě hyberboly. Právě hyperbola má totiž tu vlastnost, že všechny body na ní ležící mají stejný rozdíl vzdáleností od obou ohnisek hyperboly. V ohniscích oné hyperboly se nacházejí vysílače.
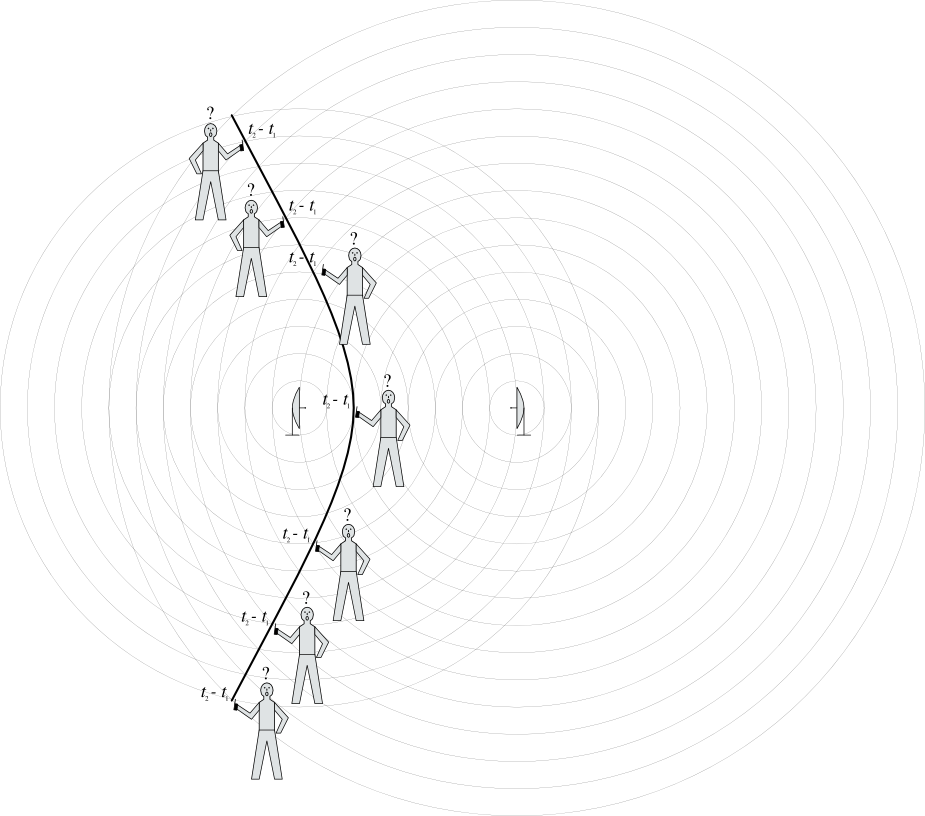
Přijetím signálu ze dvou vysílačů lze stanovit hyperbolu, na které se
nachází přijímač. Přesnou pozici však určit nelze (SVG).
Ke stanovení polohy potřebujeme ještě jeden vysílač. Jsou-li vysílače tři, pak získáme tři časové rozdíly (t2 - t1, t3 - t2 a t3 - t1) z nichž pouze dva jsou nezávislé, tedy z libovolných dvou lze vypočítat zbývající třetí. Dva časové rozdíly určují dvě hyperboly a my víme, že se vysílač současně nachází na obou hyperbolách. Průsečík těchto hyperbol tedy jednoznačně určuje polohu přijímače. Na následujícím obrázku jsou znázorněny tři vysílače a tři hyperboly, z nichž libovolné dvě stačí k určení polohy.
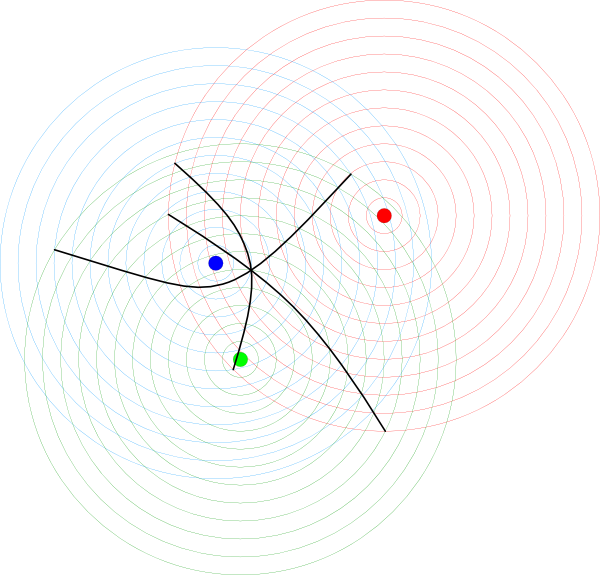
Ve dvojrozměrném případě jsou k určení pozice zapotřebí tři vysílače (SVG).
Uvážili jsme jednorozměrný příklad, kdy k určení polohy postačily dva vysílače. Následoval případ dvojrozměrný, kdy počet vysílačů musel být zvýšen na tři. Zbývá poslední případ - trojrozměrný. Nebudeme již zabíhat do podrobností, a tak shrňme pouze výsledky. Z časového rozdílu mezi dvěma signály můžeme stanovit, že se příjímač nachází někde na povrchu rotačního hyperboloidu. Máme-li k dispozici čtyři vysílače, pak získáme šest časových rozdílů (t2 - t1, t3 - t2, t4 - t3, t3 - t1, t4 - t2 a t4 - t1), z nichž pouze tři jsou nezávislé - zbývající lze dopočítat. Můžeme zkonstruovat šest rotačních hyperboloidů protínajících se v jednom bodě v prostoru. Postačí však libovolné tři. Nejdůležitější závěr plynoucí z celého rozboru je to, že v trojrozměrném prostoru potřebujeme čtyři družice. Díky nim lze stanovit všechny tři souřadnice bodu v prostoru, tedy zeměpisnou délku, zeměpisnou šířku a nadmořskou výšku. Pro úplnost je třeba podotknout, že existuje i dvojrozměrný mód GPS přijímačů, který se aktivuje ve chvíli, kdy je k dispozici signál pouze ze tří družic. V takovém případě nelze určit zbývající třetí hyberboloid a místo něj se při výpočtu použije Zemský povrch. Jedná se o východisko z nouze - výsledkem je pouze odhad dvou zeměpisných souřadnic, přičemž výšková souřadnice zcela chybí.
Dosud jsme uvažovali pouze počet družic, ale je též nutno vzít v úvahu i jejich rozmístění vzhledem k poloze přijímače. Kdyby byly všechny čtyři družice umístěné v jednom bodě, jsou k určení polohy zcela bezcenné. Kdyby spolu s přijímačem tvořily přímku, můžeme určit pouze jednu souřadnici. Kdyby ležely v právě jedné rovině, můžeme vypočítat pouze dvě souřadnice. Družice a přijímač se tedy nikdy nesmí dostat do jedné roviny. Může se zdát, že tato podmínka není příliš svazující, a že je téměř vyloučeno, aby se vše nacházelo přesně v rovině. Reálná situace je však komplikovanější. Čím plošší je uspořádání, tím větší chyba nastává při určování polohy. Měření časových rozdílů je totiž vždy zatíženo chybami. Tyto chyby promítnou do celkové chyby výsledku v závislosti na tom, jaké je rozestavění družic. Úhel družice-přijímač-družice by měl být co největší. Byl zaveden koeficient označovaný PDOP (Position Dilution Of Precision), který reprezentuje rozestavění družic. Čím lépe jsou družice rozmístěny vzhledem k uživateli, tím je tento koeficient vyšší.
Koncepce GPS byla navržena tak, aby uživatel kdekoli na Zemi mohl přijímat signál z dostatečného počtu vhodně rozmístěných družic. Byly provedeny podrobné studie rozebírající mnoho různých faktorů jakými jsou například selhání družice, minimální úhel nad obzorem (pět stupňů), vyzařovací úhel antén (plus mínus 14.3 stupňů), koeficient PDOP vyšší než šest, vychýlení ze stanovené dráhy a jiné. Na základě všech požadavků byl projekt GPS realizován pomocí 24 družic obíhajících v šesti kruhových drahách kolem Země. V každé oběžné dráze se nacházejí čtyři družice. Družice obíhají ve výšce 20 200 kilometrů nad zemským povrchem a jejich oběžná doba je polovina hvězdného dne. Pro připomenutí – hvězdný den je doba otočení planety Země kolem své osy vzhledem ke hvězdám. Je přibližně o čtyři minuty a čtyři sekundy kratší než běžně používaný Sluneční den (to je doba otočení Země vzhledem ke Slunci – přesně 24 hodin). Oběžná doba GPS družic vychází přibližně na 11 hodin, 58 minut a 2 sekundy, což představuje 43 082 sekund. V důsledku takto zvolené periody dochází k zajímavému jevu – vzájemná poloha a orientace Země, hvězdné oblohy a družic se opakuje pokaždé, když družice dvakrát oběhnou Zemi. Na tomto místě by bylo vhodné podotknout, že nelze libovolně zvolit oběžnou dobu družice a její vzdálenost od povrchu Země. Obě veličiny jsou navzájem spjaty vztahem vycházejícím z pohybu po kružnici a Newtonova gravitačního zákona. Platí:
![]()
kde h je vzdálenost družice od povrchu Země, M je hmotnost Země (5,98.1024 kg), κ je gravitační konstanta (6,67.10-11 m3 s-2 kg-1), R je poloměr Země (6375.103 m). Dosadíme-li za T oběžnou periodu 43082 sekund, vyjde nám h=20189 km, což velmi dobře souhlasí s udávanou hodnotou.
V rámci projektu GPS byl proveden výpočet dostupnosti signálu v průběhu 24 hodin. Předpověď byla stanovena pro síť uzlových bodů na povrchu Země se vzájemnou vzdáleností 111 kilometrů. Výpočet přinesl řadu výsledků, z nichž uveďme pouze některé. Ukázalo se, že zvolená koncepce zaručuje 99,9% spolehlivost i přesto, že vezmeme v úvahu možné odchýlení družic z jejich nominálních drah. Pro několik málo míst na Zemi může v nejhorším možném případě klesnout spolehlivost na 96,9%.
Služba, kterou projekt GPS poskytuje, se nazývá SPS (Standard Positioning Service). Zahrnuje možnost určení polohy a seřízení přesného času. V rámci SPS vysílají družice všechny potřebné informace na frekvenci označované jako L1, která je rovna 1575,42 MHz. Kromě tohoto signálu se vysílají další informace na frekvenci L2 (1227.6 MHz), které nejsou součástí služby SPS. Frekvence L2 je určena pro armádní účely, ale přesto mnoho výrobců přijímačů tento signál využívá. Ukazuje se totiž, že příjem signálů o dvou různých frekvencích umožňuje odhadnout vliv ionosféry na zpoždění signálu. Díky tomu lze při výpočtu provést korekce, které zpřesňují určení polohy.
Všechny družice vysílají na stejné frekvenci, a tak musel být nalezen způsob, jak může přijímač získat signál od všech současně a zároveň odlišit, od které družice danou informaci získal. Každá družice tedy k signálu přidává ještě tzv. pseudonáhodný šum (PRN, Pseudo Random Noise), což je sekvence nul a jedniček, která se po každých 1023 bitech stále opakuje. Na první pohled sekvence vyhlíží jako náhodný šum (z čehož byl odvozen i název), avšak jde o předem známou posloupnost, která je různá pro každou družici. Tato řada bitů není libovolná a musí splňovat mnohá matematická kritéria, aby ji přijímač dokázal bezpečně rozeznat. Koncepce použitá pro generování PRN umožňuje vytvořit 36 různých posloupností označovaných čísly 1 až 36, z čehož se odvíjí identifikační číslo dané družice. Bylo stanoveno, že použití sekvencí s číslem vyšším než 32 bude rezervováno pro jiné účely (například pozemní vysílače). Problematika PRN je velmi zajímavá a je téměř zázrak, že přijímač dokáže směs signálů od jednotlivých družic zpětně rozložit, nalézt příslušné informace a ještě stanovit vzájemná zpoždění signálu. Přijímač obvykle potřebuje získat dostatek dat k tomu, aby seřídil své vlastní generátory PRN v souladu s přicházejícím signálem. Tato operace vyžaduje určitý čas, který je uveden na stránkách výrobce. V případě přijímače Navilock 202U je tzv. studený start roven 48 sekundám.
Počátky GPS systému spadají do 60. let dvacátého století. Primární účel, pro který byl systém GPS konstruován, souvisí se snahou o získání univerzálního, vysoce přesného, lehce přístupného pozičního a navigačního systému, který byl do té doby nahrazován množstvím specifických zařízení, která ovšem byla velmi nákladná a měla pouze omezené možnosti užití. Výsledkem bylo, že americké námořnictvo a letectvo začalo nezávisle na sobě studovat možnosti využití rádiového signálu vysílaného ze satelitů a jeho užití v navigaci. Námořnictvo sponzorovalo dva výzkumné programy a to Transit a Timation, letectvo se podílelo na podobném programu nazvaném System 621B. V roce 1973 pak došlo ke kompromisu a byl vyvinut nový společný program GPS, který kombinoval prvky obou programů. Pro první fázi GPS byl stanoven rozpočet ve výši 100 milionů dolarů.
V letech 1978 až 1985 bylo vypuštěno jedenáct satelitů, jeden satelit byl zničen při nezdařeném startu. Původně byla životnost těchto satelitů stanovena na tři roky, mnoho z nich však sloužilo i přes deset let. V osmdesátých letech bylo vysláno dalších 23 satelitů. V současné době je systém GPS zabezpečován 24 satelity. První důležitým testem pro GPS systém bylo jeho použití během válečné operace v Perském zálivu v letech 1990 až 1991, kdy se ukázalo, jak je navigace důležitá. GPS satelity umožnily orientaci v těžkém pouštním terénu s nebývalou přesností. Říká se, že jednou ze dvou věcí, která stály za vítězstvím, byla právě GPS navigace (druhou bylo zařízení pro noční vidění). Kromě války v Perském zálivu bylo GPS použito v mnoha dalších operacích. Během operace Restore Hope v roce 1993 bylo použito ke leteckému zásobování potravin ve vzdálených oblastech Somálska, které by jinak nebylo možné z důvodu neexistence přesných map a pozemních navigačních přístrojů. Dalším příkladem může být jeho použití během balkánské krize, kdy se za pomocí GPS navigace doručovaly balíčky humanitární pomoci.
V příštím díle se dozvíte, jak číst data z GPS příjímače.
Poděkování
Tento článek vznikl za podpory grantu GAČR 103/06/1711.
Nástroje: Tisk bez diskuse
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 6.9.2006 00:32
Honza Balák | skóre: 23
| blog: Jaxův linuxový zápisník
| Předklášteří
6.9.2006 00:32
Honza Balák | skóre: 23
| blog: Jaxův linuxový zápisník
| Předklášteří
 Zatiaľ pekný článok.
Zatiaľ pekný článok.
 6.9.2006 08:33
Martin Ždila | skóre: 10
| Košice, Slovensko
). Vdaka za clanok a tesim sa na pokracovanie. Mozno by bolo dobre nieco spomenut okolo SiRF III protokolu, nejake dobre GPS aplikacie pre Linux (gpsdrive, ...) a pre J2ME (pouzivam MobiTrackPRO na mojom SE K750i), staticka (static navigation) vs. nestaticka navigacia.
6.9.2006 08:34
Martin Ždila | skóre: 10
| Košice, Slovensko
6.9.2006 08:33
Martin Ždila | skóre: 10
| Košice, Slovensko
). Vdaka za clanok a tesim sa na pokracovanie. Mozno by bolo dobre nieco spomenut okolo SiRF III protokolu, nejake dobre GPS aplikacie pre Linux (gpsdrive, ...) a pre J2ME (pouzivam MobiTrackPRO na mojom SE K750i), staticka (static navigation) vs. nestaticka navigacia.
6.9.2006 08:34
Martin Ždila | skóre: 10
| Košice, Slovensko
 6.9.2006 09:07
CIJOML | skóre: 58
| Praha
6.9.2006 12:00
Martin Ždila | skóre: 10
| Košice, Slovensko
6.9.2006 09:07
CIJOML | skóre: 58
| Praha
6.9.2006 12:00
Martin Ždila | skóre: 10
| Košice, Slovensko
 6.9.2006 20:56
the.max | skóre: 46
| blog: Smetiště
). Toto je ale velky problem, pretoze ak by bol sofer v aute sam, nema sancu si to za jazdy zresetovat vsetko sam.
6.9.2006 20:56
the.max | skóre: 46
| blog: Smetiště
). Toto je ale velky problem, pretoze ak by bol sofer v aute sam, nema sancu si to za jazdy zresetovat vsetko sam.
Me by zajimalo, jak je to s tim novym evropskym navigacnim systemem (Galileo). Ma to byt snad 30 satelitu + pozemni stanice, presnost 10x lespi nez alteranativy. Naposledy jsem slysel, ze vypustili prvni satelit(y) - nekdy pred pul rokem.
Zajimal by me aktualni stav a vyhled do blizke budoucnosti, a predevsim jestli se jedna o uplne jinou technologii nez GPS - tj. nekompatibilni prijimace atd.
6.9.2006 20:59
the.max | skóre: 46
| blog: Smetiště
 Neco podobneho bude mit urcite i Galileo a plna presnost bude dostupna zase jen armade.
Neco podobneho bude mit urcite i Galileo a plna presnost bude dostupna zase jen armade.

 7.9.2006 07:40
Petr Bravenec | skóre: 43
| blog: Bravenec
7.9.2006 07:40
Petr Bravenec | skóre: 43
| blog: Bravenec
 8.9.2006 12:22
koulinek | skóre: 19
| blog: koulonet
8.9.2006 12:22
koulinek | skóre: 19
| blog: koulonet
Obavam se, ze tato podpora je urcena primarne k vyzkumu - ne k opisovani ci prekladu anglickych clanku a manualu.Mám takový nepříjemný pocit, že asi netušíte, že opisovani ci preklad anglickych clanku a manualu je naprosto nezbytnou součástí každého vyzkumu. Průšvih nastane teprve tehdy, když to u toho zůstane. Strunc, sakra to mi něco říká, ale to asi nebudete vy ten Štrunc, kterého si vybavuju, protože ten o výzkumu něco ví.
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz{kind=link}
{kind=link}
{kind=link}