Představena byla nová linuxová distribuce Shadowfetch Linux. Na rozdíl od mnoha nováčků, které nabízejí převážně jiné téma a výběr softwaru, tato distribuce založená na Debianu Testing s desktopovým prostředím KDE Plasma 6.6, klade lokálně běžící umělou inteligenci do centra svého desktopového zážitku.
Max Leiter v roce 2019 zkusil zprovoznit X server na iPadu (iOS). Nyní se k tématu vrátil a s pomocí LLM a balíčkovacích nástrojů Procursus rozběhl desktop s X11 i Waylandem. Jeho balíčky jsou dostupné v repozitáři xiOS.
Společnost Google Cloud dnes oznámila, že její infrastruktura a služby byly oficiálně zařazeny do Katalogu cloud computingu vedeného Digitální a informační agenturou (DIA). Tato certifikace potvrzuje, že infrastruktura a služby Google Cloud splňují přísné bezpečnostní a regulační požadavky České republiky pro provoz cloudových služeb ve veřejném sektoru.
Vůbec poprvé v historii se stát při testování digitálních služeb obrací na širokou veřejnost. Digitální a informační agentura (DIA) a Ministerstvo vnitra zvou občany k zapojení do zátěžového testu eDokladů, které od loňského podzimu prošly optimalizací aplikace a posílením infrastruktury. Test proběhne 13. srpna ve 13:00 a pro jeho úspěch bude potřeba zapojení několika desítek tisíc občanů. Zapojení do testu je zcela dobrovolné a úkol
… více »FireDragon je webový prohlížeč, doposud založený na Floorpu, jednom z forků Firefoxu s větším důrazem na ochranu soukromí a přizpůsobení uživatelského rozhraní. Spravuje ho člen komunity distribuce Garuda Linux. Nové vydání verze 13 opouští Floorp a přechází přímo na Firefox s patchi z LibreWolfu a vlastními úpravami. Dostupný je také na Flathubu.
picogame (GitHub) je malý 2D herní engine pro mikrokontroléry jako RP2040, čip uvnitř kapesní konzole Picopad. Hru napíšeš v Pythonu a vyzkoušíš ji v prohlížeči nebo desktopovém simulátoru. Až bude hotová, zkopíruješ ji na podporovanou desku. Na začátku nepotřebuješ C, sestavení firmwaru ani hardware.
Multiplatformní prohlížeč elektronických knih KOReader byl vydán ve verzi 2026.07 "Sailing Walrus". U PDF souborů s SMask lze vyčistit pozadí. Přibyla podpora Kobo v5 nebo základní podpora OPDS 2.0.
Společnost Valve sponzoruje a společnost Collabora portuje RADV (open source Vulkan ovladač pro AMD GPU z projektu Mesa) na Windows.
Starling (GitHub) je desktopové prostředí vytvořeno umělou inteligencí (s dohledem jednoho vývojáře během šesti měsíců).
Dne 30. června 2026 byla završena fyzická realizace projektu Czech National Quantum Communication Infrastructure (CZQCI), tedy České národní kvantové komunikační infrastruktury. Projekt byl realizován od 1. března 2023 a financován z Národního plánu obnovy částkou 121,6 milionu Kč. Cílem podpořeného projektu bylo vybudovat základy národní kvantové komunikační infrastruktury a ověřit možnosti jejího praktického využití. Mezi
… více »
2.3.2021 17:52
| Přečteno: 7217×
| Meteopress
|  | poslední úprava: 2.3.2021 17:52
| poslední úprava: 2.3.2021 17:52
Dnes se podíváme na to, jak z naměřených dat udělat produkt, který lze zobrazit uživateli.
Předchozí díly seriálu:
Jak jsme si řekli v předchozích dílech, (aktivní) radar vyšle signál a následně poslouchá, co se vrátilo. V nejjednodušším případě (magnetronový nemodulovaný vysílač) jde o krátký pulz a přijímač je amplitudový demodulátor/detektor obálky. Najdeme tedy na konektoru u přijímače kontakt, na kterém je výstup tohoto detektoru, zapíchneme do něj sondu osciloskopu a vyšleme impulz, tj. vybijeme kondenzátorovou banku do magnetronu.
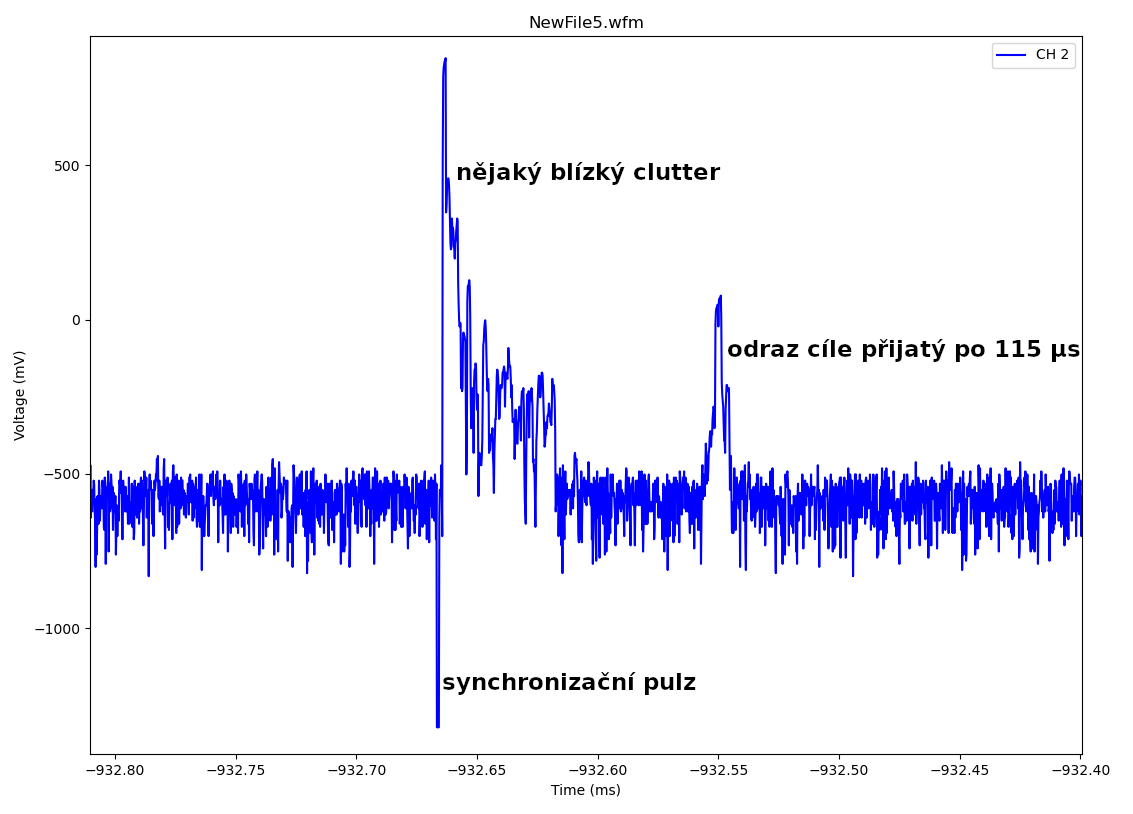
Získali jsme to, čemu se říká A-scope (1, 2). Vidíme tam řádkovou synchronizaci, protože je to celé nekonečně analogové, následně nějaké blízké odrazy, pak chvíli nic a pak nějaký další odraz. Ten byl přijatý po 115 μs, což znamená, že signál za tu dobu uletěl 115 μs * 300000 km/s = 35 km, a protože letí tam a zpátky, tak se jedná o cíl, který je 17 km daleko. (mimochodem technicky tohle vzniklo pomocí osciloskopu Rigol DS1054Z a RigolWFM)
A-scope je nejjednodušší zobrazení, a zobrazení prvních radarů ze 30. let, protože se dá realizovat s primitivní technologií: stačí vám obrazovka, a uděláte sweep přes stínítko v okamžiku vyslání impulzu. Nevýhodou samozřejmě je, že se to dost špatně používá pokud vás zajímá složitější informace než „v takové vzdálenosti něco je“, a vyžaduje to zkušeného operátora.
Na výše uvedeném A-scope jsme zobrazili amplitudu přijatého signálu. Problém je, že tato amplituda dost zásadně závisí na vzdálenosti cíle:
Pro „malý cíl“ (malým cílem se myslí takový cíl, který je menší než je velikost paprsku z naší antény. V prvním díle jsme si řekli, že běžné radarové antény mají šířku svazku kolem 1 až 2°, tj. například ve vzdálenosti 50 km je šířka svazku cca. kilometr. Za malý cíl tedy budeme považovat věci podstatně menší než kilometr. Typickým malým cílem je letadlo) platí radarová rovnice, která říká, že intenzita přijatého signálu je úměrná 1/vzdálenost4. Proč to tak je? Námi vyslaný signál se šíří jako výsek kulové vlnoplochy, tj. jeho prostorová intenzita klesá s druhou mocninou vzdálenosti. Následně narazí na cíl a odrazí se od něj (přesněji řečeno se rozptýlí). Tento vrácený signál se opět šíří jako kulová vlnoplocha, takže opět dojde k poklesu intenzity s druhou mocninou vzdálenosti.
Už jsem tu kdysi něco psal a Chapadla z toho pak udělala tričko. Teď mají partnerství s Bugemosem. Mohli by nějak zfúzovat tohle s výše uvedeným.
Pro „velký cíl“, který je větší než náš svazek, což může být například mrak (typicky velký několik kilometrů), klesá intenzita s druhou mocninou, neboť se do něj trefíme celým naším svazkem, a nedojde tak k žádné ztrátě energie (až na útlum v atmosféře, který nyní zanedbáme, byť u X-band radarů je poměrně značný) na cestě „tam“. Ke ztrátám dochází až u odraženého signálu, a to je ta druhá mocnina.
Pro liniové cíle, například silnice, klesá intenzita odrazu se třetí mocninou vzdálenosti, ale to většinou nikdo neřeší.
Protože se často vyplatí zpracovávat signál logaritmicky (v decibelech), pro intuici (ve skutečnosti jsem to tam přesně takhle nahardcodoval když jsem to programoval) si řekneme, že „klesá s druhou mocninou vzdálenosti“ = „ve dvojnásobné vzdálenosti se zeslabí 4x“ = „ve dvojnásobné vzdálenosti se zeslabí o 6 dB“.
Tuhle korekci nejspíš nechcete dělat u debugovacího zobrazení, když koukáte na surové úrovně signálu, ale jakmile chcete data jakkoli interpretovat, tak je potřeba to s touto znalostí přepočítat. Jinak se vám stane, že se k vám něco blíží, jedná se stále o ten stejný objekt, ale tím, jak se přibližuje, tak se stále zesiluje a zesiluje, pak profrčí kolem vás, a pak se zase zeslabuje. Je to velmi matoucí a alespoň já tuto korekci nedokážu aplikovat pouze myšlenkově.
Jmenuje se to Sensitivity time control (STC) (1, 2) a lze to dělat dvěma způsoby: samozřejmě softwarově (při kreslení na obrazovku signál správně vynásobíte podle vzdálenosti) a hardwarově (to byla nutnost do nástupu počítačů, ale i dnes se to hodí, viz dále). Hardwarová implementace funguje tak, že do obvodu zapojíte řiditelný atenuátor (což se realizuje jako odporový dělič z několika odporů různých hodnot, které můžete přepínat). V okamžiku vyslání impulzu nastavíte maximální útlum, a útlum následně snižujete tak, aby vždy po dvojnásobném čase poklesl o těch 6 dB. Proto se tomu říká sensitivity time control, protože jde o změnu citlivosti přijímače v závislosti na čase od vyslání pulzu.
Na následujícím obrázku je tento efekt „6 dB na dvojnásobnou vzdálenost“ krásně vidět (zdroj).
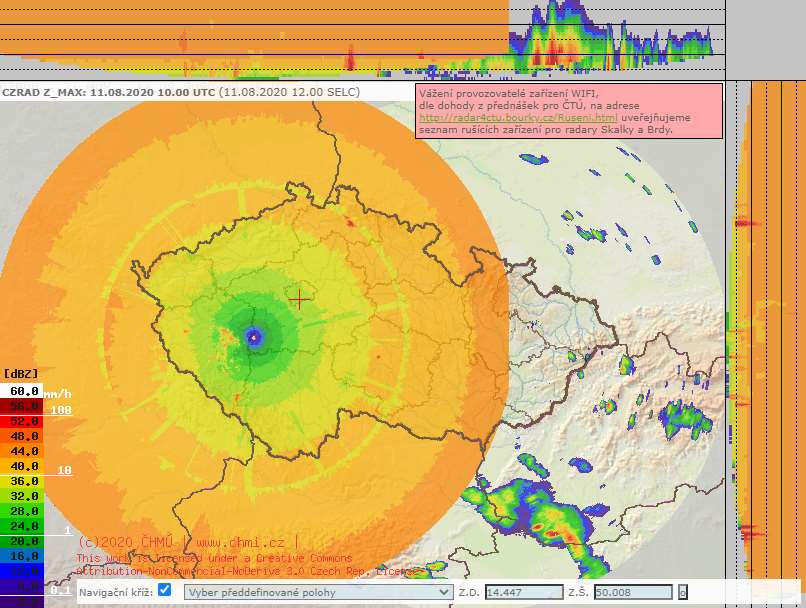
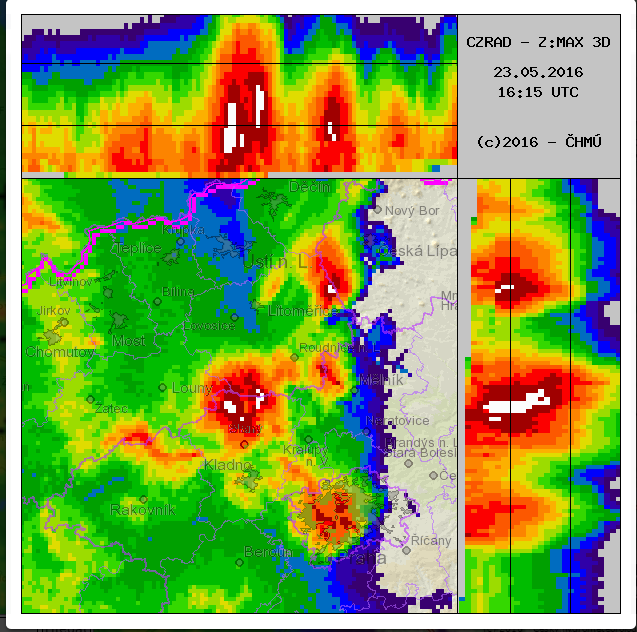
Meteorologové používají jednotky dBZ. Hodnoty, které bychom chtěli umět s radarem měřit, jsou od cca. 10 dBZ (slabé poprchávání) po 60 dBZ (krupobití), tj. dynamický rozsah 50 dB. Dále ze vzdálenosti nám vyplývá rozdíl řekněme mezi 10 km a 160 km „čtyři dvojnásobky“, tj. 24 dB. Dynamický rozsah dat je tak minimálně 84 dB, samozřejmě je potřeba nechat nějakou rezervu nahoře i dole, a najednou požadujeme systém s dynamickým rozsahem přes 100 dB, což nejde moc udělat. Proto jsem výše psal, že se hodí hardwarové STC, čímž to přispění k dynamice měnící se vzdáleností můžeme ořezat.
B-scope (1, 2) je vlastně polární plot, kde na jedné ose je úhel (tím, jak se anténa otáčí kolem svislé osy), na druhé ose je vzdálenost, a barva kóduje intenzitu (na níže uvedeném obrázku je to již se STC korekcí).
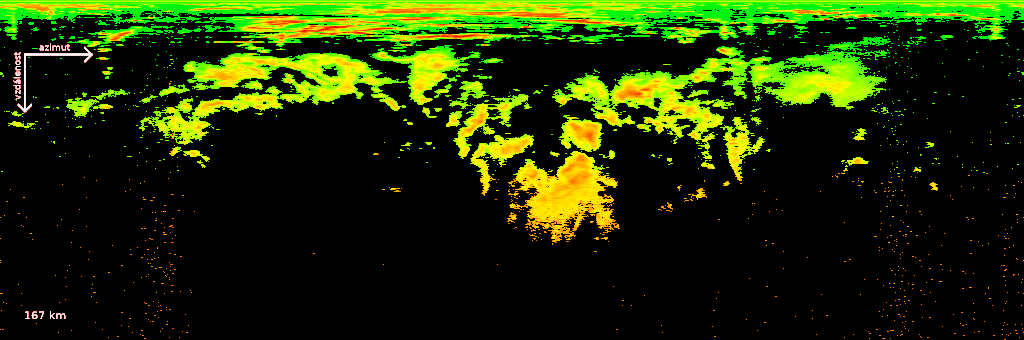
B-scope vznikne tak, že vezmete po sobě jdoucí A-scopes (resp. obrazové řádky toho video signálu výše) a nakreslíte je pod sebe (uložíte do pole). V anténním rotátoru je typicky rotační enkodér, který vám říká, k jakému azimutu zrovna tento sweep (česky se tomu asi říká odběh) patří. Protože se anténa neotáčí dokonale rovnoměrně, tak pokud chcete, aby souřadnice sloupců ve výsledném B-scope odpovídaly lineárně azimutu, musíte to nějak interpolovat.
S B-scope už se dá rozumně pracovat a my ho používáme jako hlavní formát pro ukládání naměřených dat. Pro jeho analogovou implementaci byla potřeba „televize“ s dlouhodosvitovým luminoforem, ale analogové řízení je také celkem jednoduché (jedna osa dělá sweep s každým pulzem, druhá osa dělá sweep s potenciometrem, který je připojený na anténu).
Nejsložitější a pro koncového uživatele typicky nejvhodnější je zobrazení jménem PPI (1, 2). Je to v podstatě kartézské zobrazení polárního B-scope. Je to nakreslení obrazu na mapu tak, jak člověk přirozeně vidí mapu, a také to, jak vypadají radary ve filmech. Na počítači je to celkem jednoduché (polární/kartézská transformace souřadnic), pro analogové zobrazení to vyžadovalo nějakou složitější elektroniku.
Následující PPI plot byl pořízen radarem umístěným kousek jižně od Prahy.
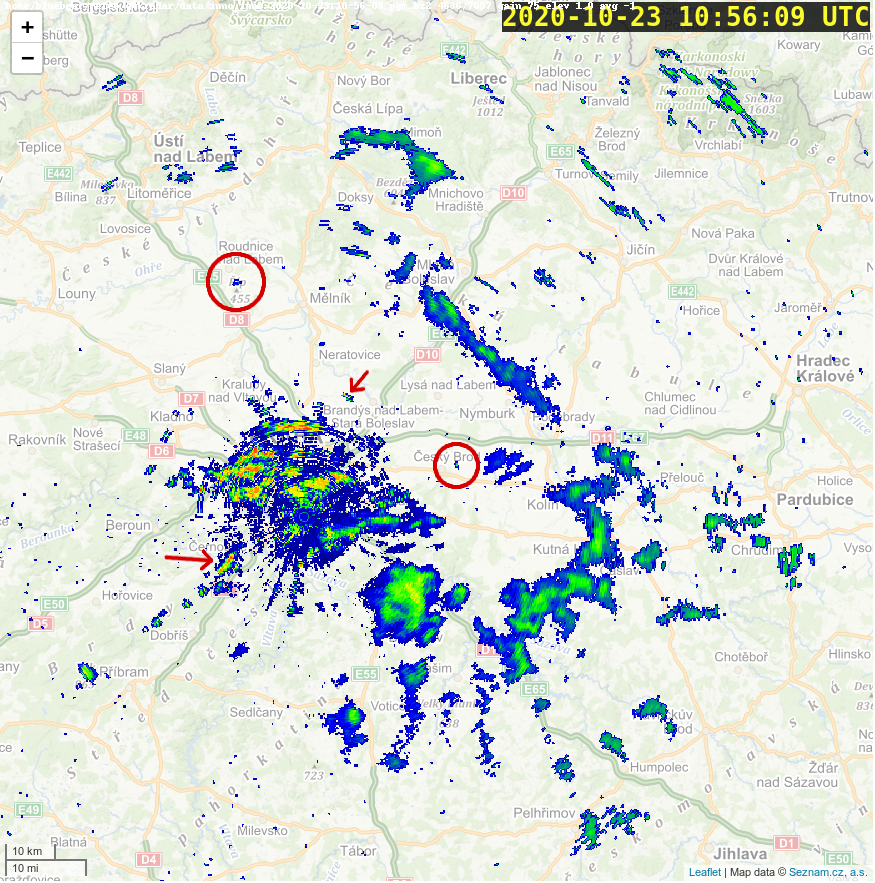
Vidíme na něm spoustu zajímavých věcí:
Ještě lépe to celé vynikne, pokud se podíváme na vývoj tohoto obrazu v čase. Animovaný GIF:
Vidíme, že identifikované pozemní cíle zůstávají na místě, jenom se trochu mihotají podle toho jak se je zrovna podařilo detekovat, letadlo nad Brandýsem letí, a všechny srážkové útvary se posouvají na severovýchod.
Protože nás zajímají srážky a ostatní věci jsou rušivé, je potřeba je nějak odfiltrovat. To bohužel nelze statickým odečtením, protože to, které kopce vidíme, se neustále mění: vlivem měnících se parametrů atmosféry se signál nešíří po přímce, ale láme se (stejně jako když ponoříte do vody brčko a vypadá divně), a tak někdy nějaké kopce vidíme a někdy ne, protože jsou za rádiovým horizontem. Dále se mění i samotná intenzita těch pozemních cílů: například podle vegetačního období (listy odráží jinak než holé stromy) nebo zmoknutí/orosení/mlhy.
Nechtěným obrazům, které radar vidí, se říká clutter, a v našem případě je většina clutteru pozemní cíle, tedy ground clutter.
Napsal jsem několik heuristik, se kterými to docela chodí, i když občas se to rozbije.
Pro různé ty kopce je to úplně super, odstraní je to a nikdo si toho nevšimne, ale pro kolečko okolo radaru už to tak dobré není a občas tam buď zůstane díra (kterou se nepodaří zalepit interpolací z okolních dat), nebo tam interpolace nakreslí nějaký hnusný artefakt (protože uvnitř kolečka je málo dat ze kterých by šlo interpolovat).
Radarů v síti je více, a jejich data se pak umístí do jedné mapy a je z toho kompozit.
Naše první radary (s parabolickou anténou - u tyčové to nedává smysl, protože má vertikálně velmi vysoký svazek) měly anténní rotátor pouze s jednou osou - azimutální (rotace kolem svislé osy). Elevace antény (tj. jak moc do nebe nebo naopak do země to má mířit) se nastavovala pevně při montáži pomocí šroubu. Nastavení probíhalo tak, že se to zkusmo udělalo, podívali jsme se na ground clutter který vidíme, a pak se to buď dalo trochu níž nebo trochu výš. Cílem je samozřejmě koukat pod co nejnižším úhlem (aby paprsek byl co nejvíc při zemi a neuletěl za chvíli nad mraky), ale současně nezarazit energii o první kopec. Tohle má dva problémy:
Přidání druhé osy na anténní rotátor, díky čemuž lze elevace měnit softwarově (a to i v průběhu skenování, klidně několikrát za minutu), tyto problémy vyřešilo a navíc umožnilo přidat funkcionalitu, kterou si popíšeme dále.
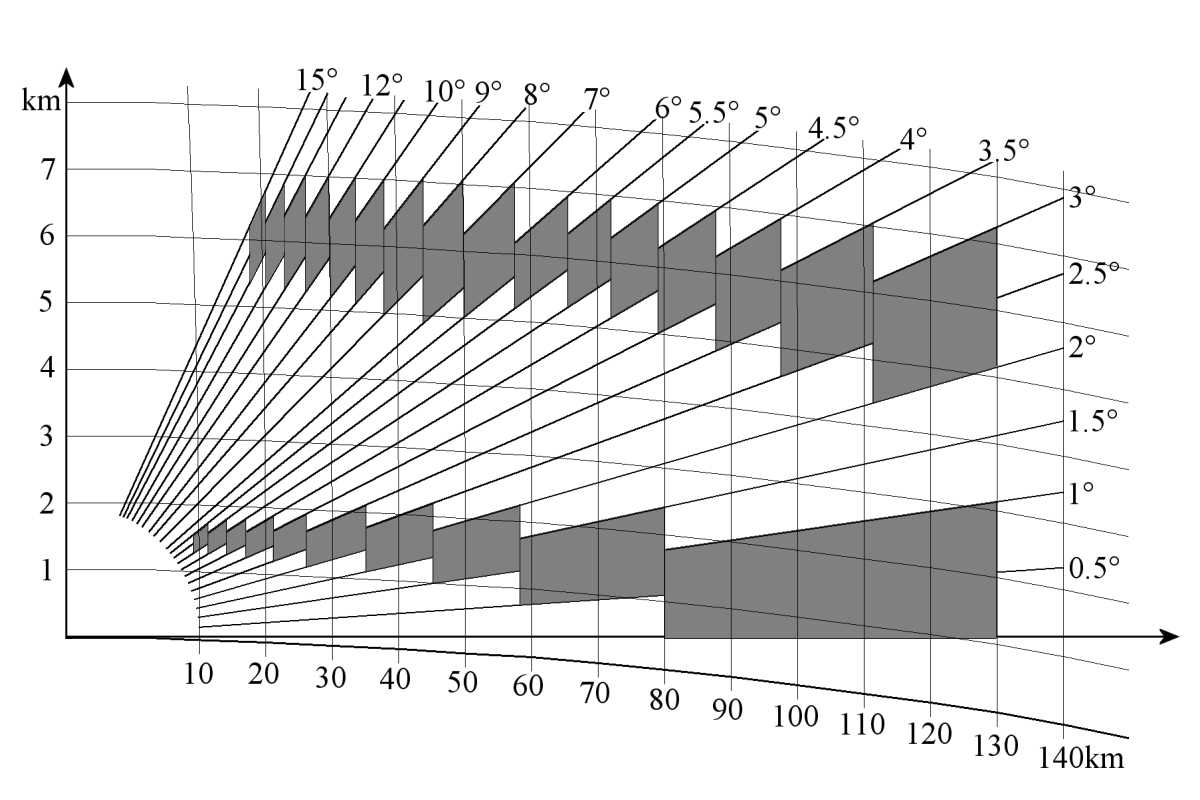
Uděláme několik skenů s různou elevací (my aktuálně používáme 1°, 2° a 3°, ale většina radarů používá o dost větší rozsah a zvažujeme, zda to také budeme dělat tak). Tím vlastně nabereme data z téměř celého prostoru, ne jen z kruhu/kuželu těsně nad zemí. Tomu se říká volumetrická, elevační nebo 3D data.
Teď máme několik možností, jak je zobrazit.
CAPPI (Constant altitude plan position indicator) (1, 2). Z volumetrických dat si vybereme ta, která jsou nejblíž k linii 1.5 km nad mořem (používá se také 2 km nebo v hornatých zemích 4 km).

Tato výška byla zvolena jako kompromis:
Pokud vás zajímá déšť v nejbližší době z pohledu uživatele (mám jít ven, mám se schovat, zmoknu…), doporučil bych používat CAPPI spíše než maxZ.
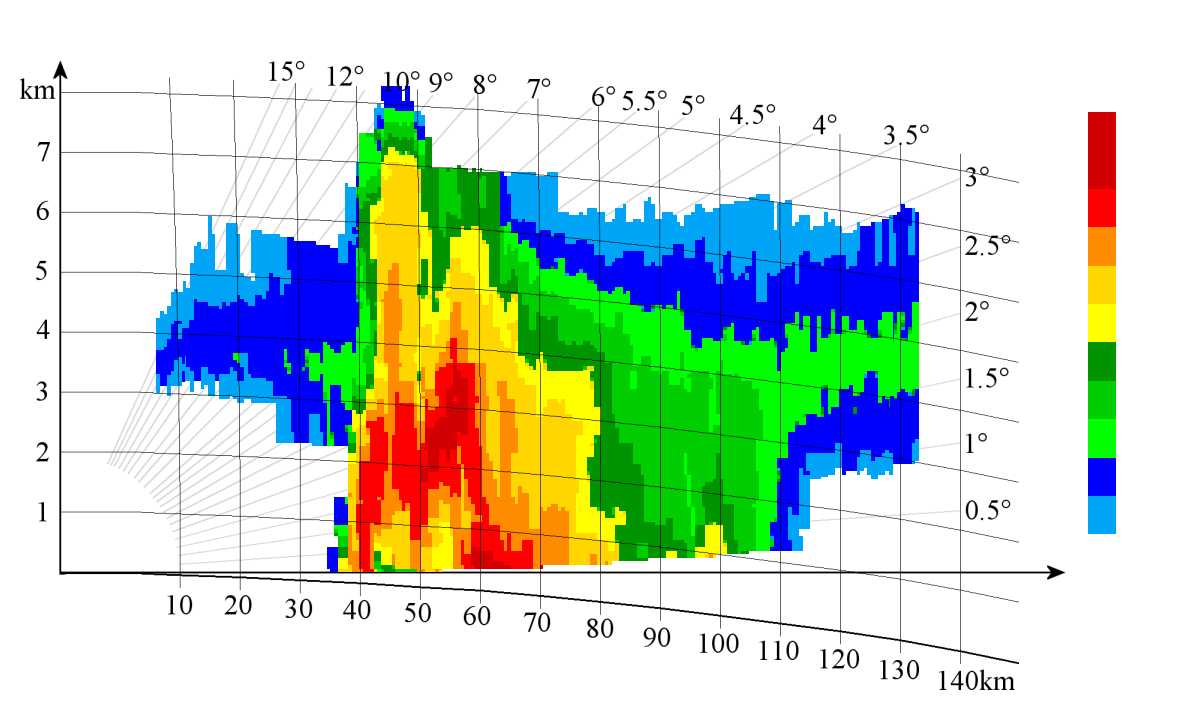
Vertikální řezy. Zejména v létě při bouřkách může být zajímavé, jak vysoko bouřka sahá, protože to odpovídá její síle a meteorolog z toho dokáže něco vykoukat. Piloti též díky tomu asi ví, jestli mohou letět nad bouřkou. Vertikální řez se buď dá udělat jako přímo řez tím 3D prostorem (toto bývá u poskytovatelů radarových dat velmi draze placená funkce), nebo se dá spočítat jakoby maxZ přes sloupečky a přes řádky a nakreslit to na kraj obrázku. Pokud není více bouřek blbě vedle sebe, tak je výška dobře vidět.
Další užitečná funkce elevace je, že s vyšší elevací je méně vidět ground clutter (protože míříme nad ty kopce). Díky tomu můžeme místa, kde při odstraňování ground clutteru vznikly díry, doplnit daty z vyšší elevace.
Po postavení radaru je obtížné přesně zjistit, jak silný signál na výstupu odpovídá jak silnému odrazu od cíle: je tam příliš mnoho stupňů, jejichž vliv na signál nelze změřit úplně přesně: výkon vysílače, zisk antény, zisk a úroveň šumu jednotlivých stupňů přijímače… My bychom ale chtěli umět barevné fleky nakreslené na mapě přepočítat na nějakou fyzikální veličinu - radarový průřez (lze použít k identifikaci typu letadla), dBZ, nebo ideálně přímo na napršené milimetry. Proto je potřeba radar zkalibrovat. Tím také zjistíme, jaký nejslabší cíl dokážeme s radarem detekovat - tj. jak je kvalitní a jestli jsme při stavbě neudělali nějakou chybu, která by citlivost radaru podstatně snížila.
V dalších dílech se podíváme na samotné deploynutí radaru, na předpovídání počasí obecně, a pak na některá pokročilejší témata ze stavby našeho vlastního radarového vysílače.
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 2.3.2021 19:20
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
3.3.2021 14:44
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
5.3.2021 17:12
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
2.3.2021 19:20
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
3.3.2021 14:44
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
5.3.2021 17:12
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
 2.3.2021 21:37
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
2.3.2021 21:37
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
nóóó a proč je jako u tý stc megabouřky tamta žlutá kružnice strčená už vtom voranžovým pásmu?? :O :O
hele věčí rozlišení
 2.3.2021 22:02
Jendа | skóre: 78
| blog: Jenda
| JO70FB
2.3.2021 22:11
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
2.3.2021 22:02
Jendа | skóre: 78
| blog: Jenda
| JO70FB
2.3.2021 22:11
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
v liberci jeto jakoby uplně červený na tý kružnici :O :O třeba to ňák souvisí :O :O nevim
3.3.2021 00:14
Jendа | skóre: 78
| blog: Jenda
| JO70FB
3.3.2021 22:03
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
v českým dabingu simpsonovejch to taky jakoby bylo vtý epizodě stim andělem vykopaným :O :O :O :O někde nazačátku to bylo si myslim :O :O
 .
9.3.2021 23:49
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
.
9.3.2021 23:49
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
jj stačí troška dislalie/tumultusu a hnedka se maj jako lidi vokolo čemu smát :D :D :D :D ;D ;D
btw jeto tam ten trilobajt v těch simpsonovejch zmíněnej ale neni tam ňák víc pitvanej už :O ;D díl Líza skeptik (S09E08) kousek před 3tí minutou :D ;D
 5.3.2021 02:05
JiK | skóre: 13
| blog: Jirkoviny
| Virginia
5.3.2021 03:03
Jendа | skóre: 78
| blog: Jenda
| JO70FB
5.3.2021 02:05
JiK | skóre: 13
| blog: Jirkoviny
| Virginia
5.3.2021 03:03
Jendа | skóre: 78
| blog: Jenda
| JO70FB
eurozpravy.cz: Důchodový medián? Polovina českých seniorů na něj nedosáhneKoukám, že úroveň toho, jak neuvěřitelnej póvl jsou novináři, je ještě horší, než jsem si myslel.
9.3.2021 13:54
JiK | skóre: 13
| blog: Jirkoviny
| Virginia
 9.3.2021 14:25
Josef Kufner | skóre: 70
9.3.2021 23:36
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
9.3.2021 14:25
Josef Kufner | skóre: 70
9.3.2021 23:36
MakeIranBombedAgain❗ | skóre: 42
| blog: Grétin blogísek
| 🇮🇱==❤️ , 🇵🇸==💩 , 🇪🇺==☭
když dáš všem uplně stejný ho..............tovosti tak medián bude stejnej a dosáhnou naněj jakoby úúúúúplně všichni :O :D :D ;D
9.3.2021 14:26
Bystroushaak | skóre: 36
| blog: Bystroushaakův blog
| Praha
9.3.2021 14:36
Jendа | skóre: 78
| blog: Jenda
| JO70FB
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz