Jack Dorsey představil (𝕏) open source týmovou komunikační platformu Buzz (GitHub) s cílem snížit závislost na Slacku a GitHubu.
Poštovní klient Thunderbird byl vydán v nové verzi 153 s kódovým názvem Meadow. Jedná se o ESR (Extended Support Release) vydání. Přehled novinek v poznámkách k vydání. Vylepšuje OAuth. Thundermail lze používat bez instalace doplňku.
AI tento rok naplno vtrhla do vývoje softwaru a výrazně ovlivňuje také open source projekty. Jiří Eischmann v příspěvku Jak mění AI open source na svém blogu rozebírá několik trendů, které v open source v poslední době v souvislosti s AI pozoruje, a jak tyto trendy svět otevřeného softwaru mění (Inflace projektů, Zahlcení kontroly, Klesající motivace zveřejňovat kód).
Evropská komise (EK) vyměřila americké internetové společnosti Google pokutu 890 milionů eur (21,5 miliardy Kč) za porušení unijního nařízení o digitálních trzích (DMA). Firma se podle unijní exekutivy provinila tím, že ve vyhledávači Google Search upřednostňovala vlastní služby a že podnikům ukládala omezení, která jim bránila nasměrovat spotřebitele k alternativním, často levnějším nákupním kanálům na platformě Google Play.
… více »Samsung na akci Galaxy Unpacked July 2026 (YouTube) představil své nové telefony Galaxy Z Fold8 Ultra, Fold8 a Flip8, hodinky Galaxy Watch Ultra2 a Watch9 a chytré brýle ve spolupráci s Gentle Monster a Warby Parker.
Po pěti letech vývoje vyšla česká počítačová hra Scarlet Deer Inn (ProtonDB). Scarlet Deer Inn je vyšívaná temná středověká pohádka. Zatímco život ve zdánlivě obyčejné vesnici se točí kolem běžných povinností a sousedských drbů, v podzemí se skrývají zlověstná tajemství.
Představen byl Raspberry Pi Touch Display 2 s uhlopříčkou 10 palců a rozlišením 1200 × 1920 pixelů. Cena je 80 dolarů.
RPCS3 (Wikipedie), tj. open source emulátor Sony PlayStation 3, snížil minimální požadavky. Nově jsou podporovány starší grafické karty ATI Radeon řady HD 2000, 3000 a 4000 z let 2007 až 2009. Na PC běží už 75 % všech her pro PlayStation 3. V budoucnu bude RPCS3 fungovat bez firmwaru z PS3. V RPCS3 byl implementován systémový modul cellSysmodule (𝕏).
Vyšel open-source nástroj winetop (MIT) — nativní CLI/TUI pro sledování a ukončování Wine, Proton, Lutris, Heroic a Bottles sezení. Seskupuje procesy podle WINEPREFIX / Steam AppId, umí bezpečně zabít jen hru (včetně Steam reaperu) a nabízí i skriptovatelné příkazy (list, kill, orphans, …). Balíčky jsou mimo jiné na crates.io, Copru (dnf copr enable kovariadam/winetop), PPA ppa:kovariadam/winetop a AUR (winetop-bin).
Ve spolupráci společností OpenAI a Work Louder byla představena (𝕏) hardwarová klávesnice Codex Micro pro práci s AI agenty. Cena klávesnice je 230 dolarů.
Z minulého dílu víme, že pomocí knihovny libfreenect lze z Kinectu získat hloubková data. Ta lze zpracovat a získat trojrozměrný obraz prostoru nacházejícího se před Kinectem. Tím ale možnosti této knihovny končí. Dalo by se říct, že pomocí knihovny libfreenect lze vidět, ale už nelze zjistit, co se vlastně vidí. Rozhraní pro detekci přítomnosti osob ve snímaném prostoru, sledování jejich pohybů, rozpoznávání poloh jejich těl nebo dokonce jejich rukou je zatím otázkou daleké budoucnosti.
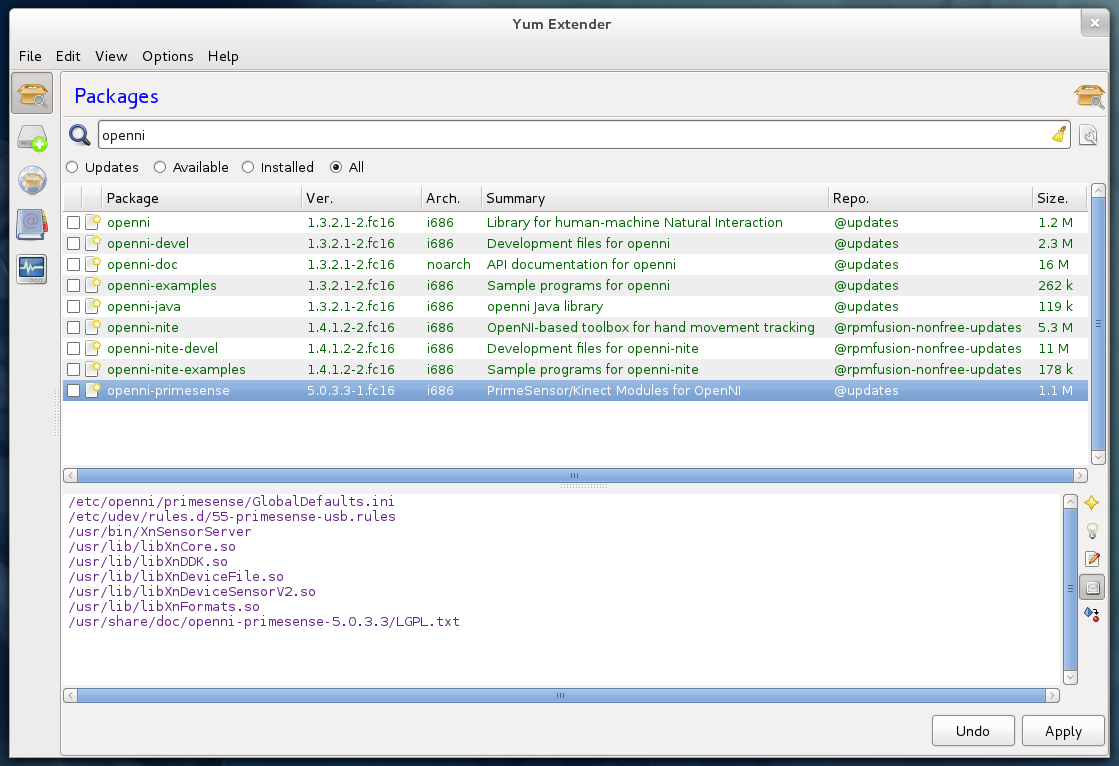
Jak již bylo zmíněno v prvním dílu, jádrem Kinectu je čip od společnosti PrimeSense (PrimeSense PS1080-A2 SoC (System on a Chip)).

Tato společnost se těsně po vzniku knihovny libfreenect rozhodla uvolnit knihovnu vlastní. Založila neziskovou organizaci OpenNI (Open Natural Interaction) jejíž cílem je rozvíjet možnosti komunikace mezi uživatelem a počítačem pomocí přirozeného uživatelského rozhraní (Natural User Interface – NUI). Dalšími členy OpenNI jsou Willow Garage, Side-Kick, ASUS a AppSide.

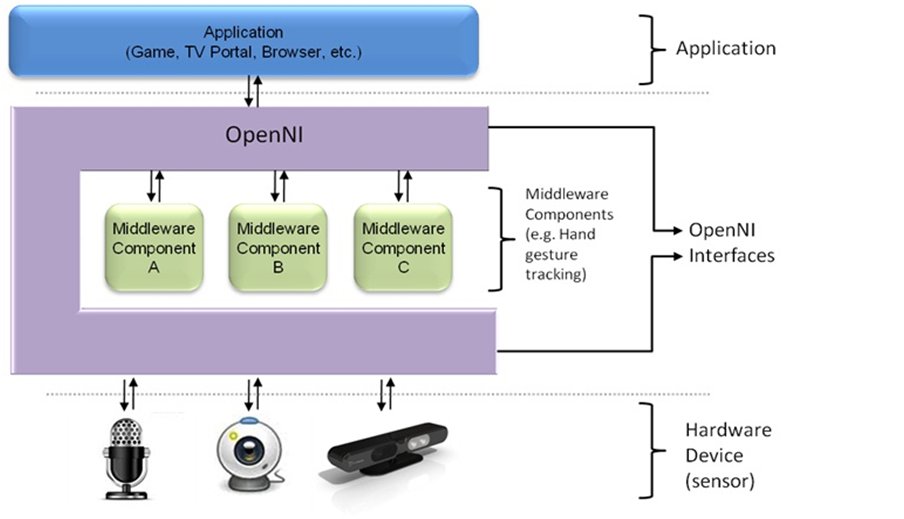
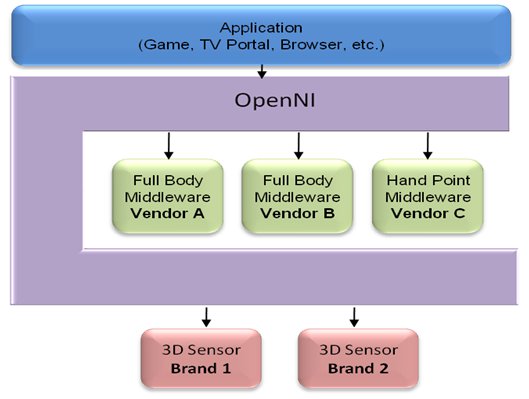
OpenNI definuje jak rozhraní pro vývoj NUI aplikací, tak rozhraní k NUI snímacím zařízením. Definováno je rovněž rozhraní k možným binárním blobům, tj. k částem, ke kterým nejsou k dispozici zdrojové kódy. OpenNI jim říká middleware.
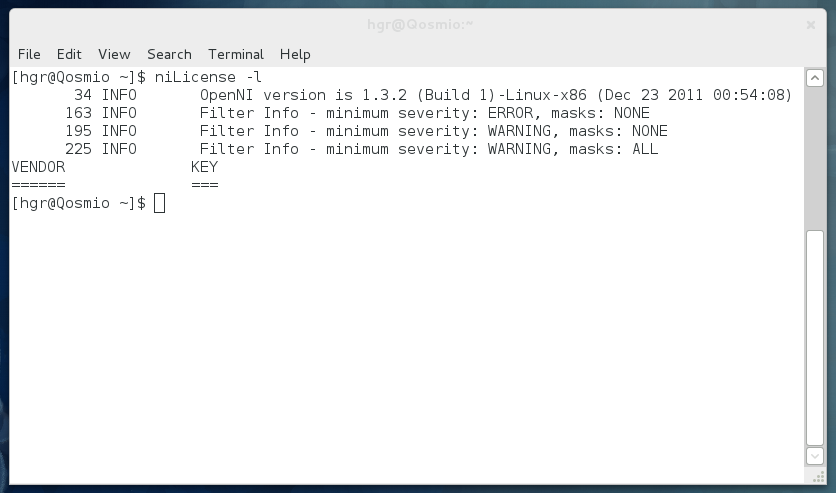
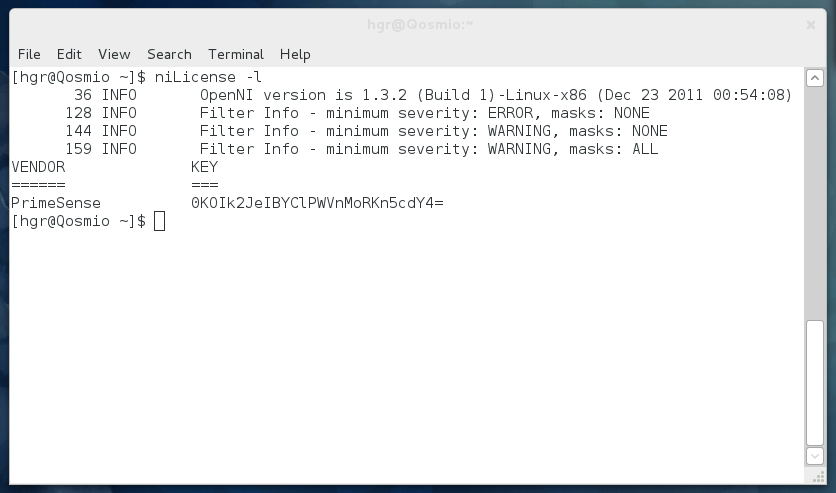
Tyto binární bloby obvykle nestačí pouze nainstalovat. Potřebné mohou být licenční klíče. Klíč k základnímu blobu NITE je veřejně známý 0KOIk2JeIBYClPWVnMoRKn5cdY4=.
Licence lze vypsat příkazem niLicense.
Knihovna OpenNI (společně s NITE) na rozdíl od knihovny libfreenect obsahuje algoritmy pro rozpoznávání polohy těla. Pomocí funkcí v knihovně obsažených lze zjistit, kde se osoba v prostoru před snímačem nachází, lze sledovat její pohyb, lze zjistit, zda osoba předpažila nebo upažila. Ke knihovně je k dispozici dokumentace a diskusní fórum.
Kde knihovnu OpenNI získat a jak ji nainstalovat? Nejjednodušší samozřejmě je, pokud vaše linuxová distribuce balíčky s OpenNI přímo podporuje. Příkladem může být Fedora 16 s devíti balíčky souvisejících s OpenNI.
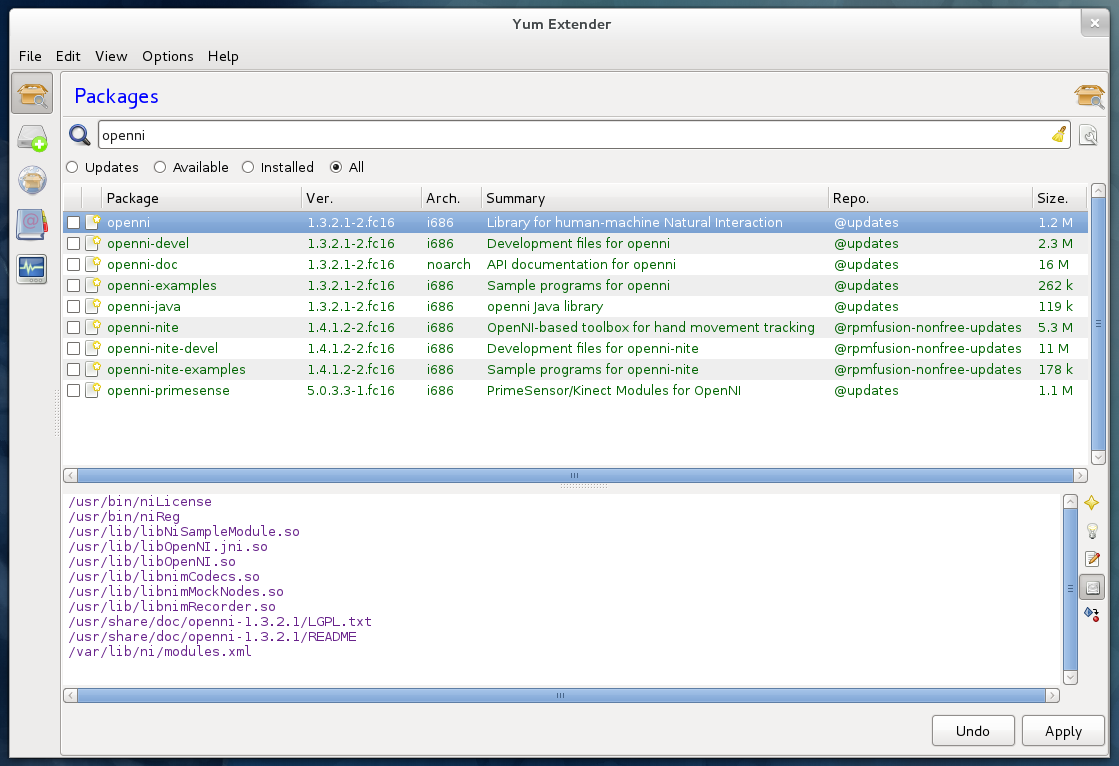
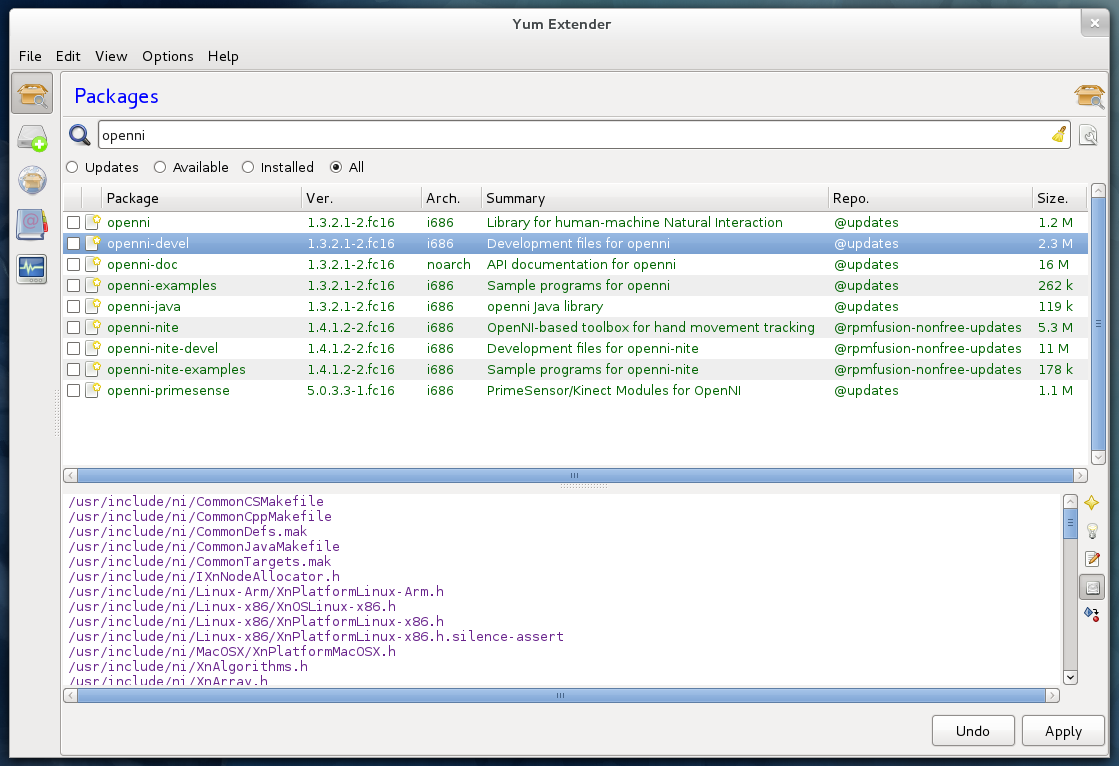
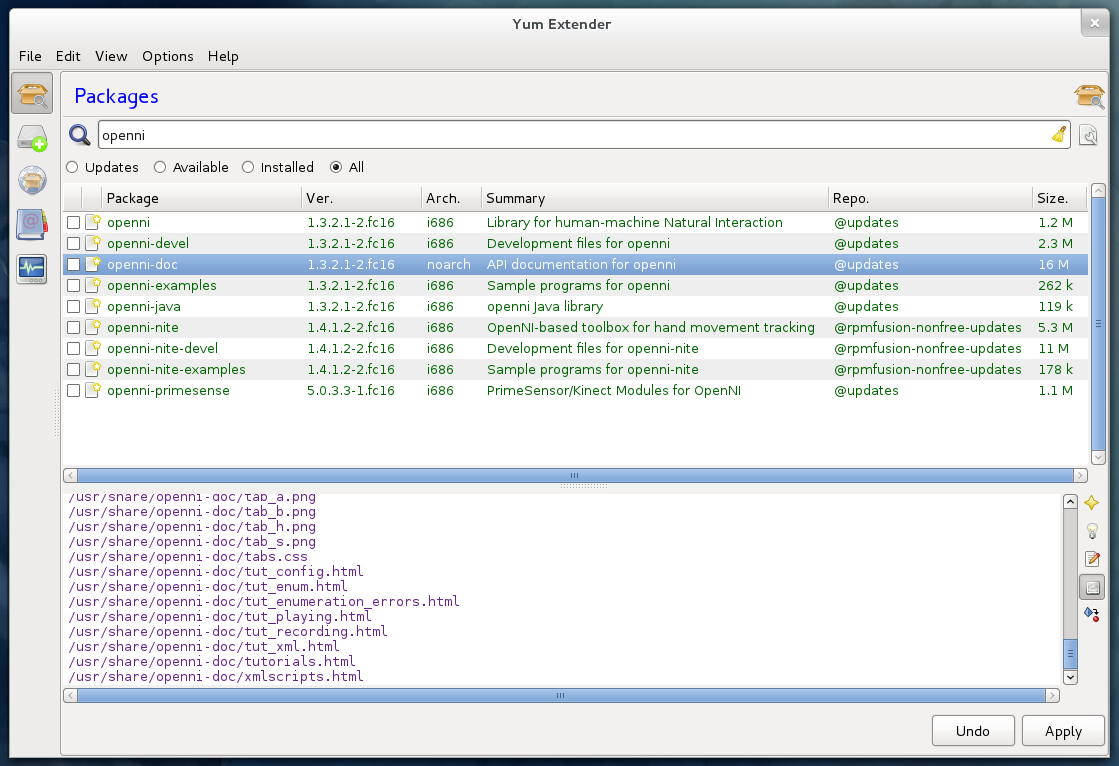
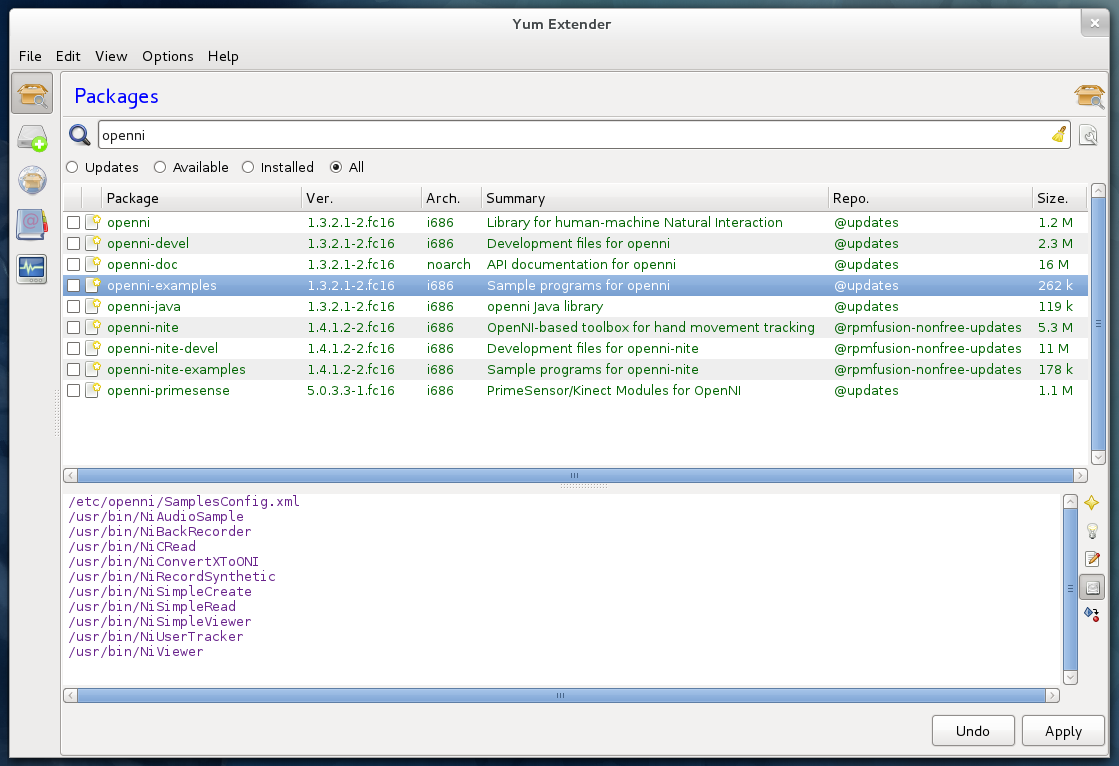
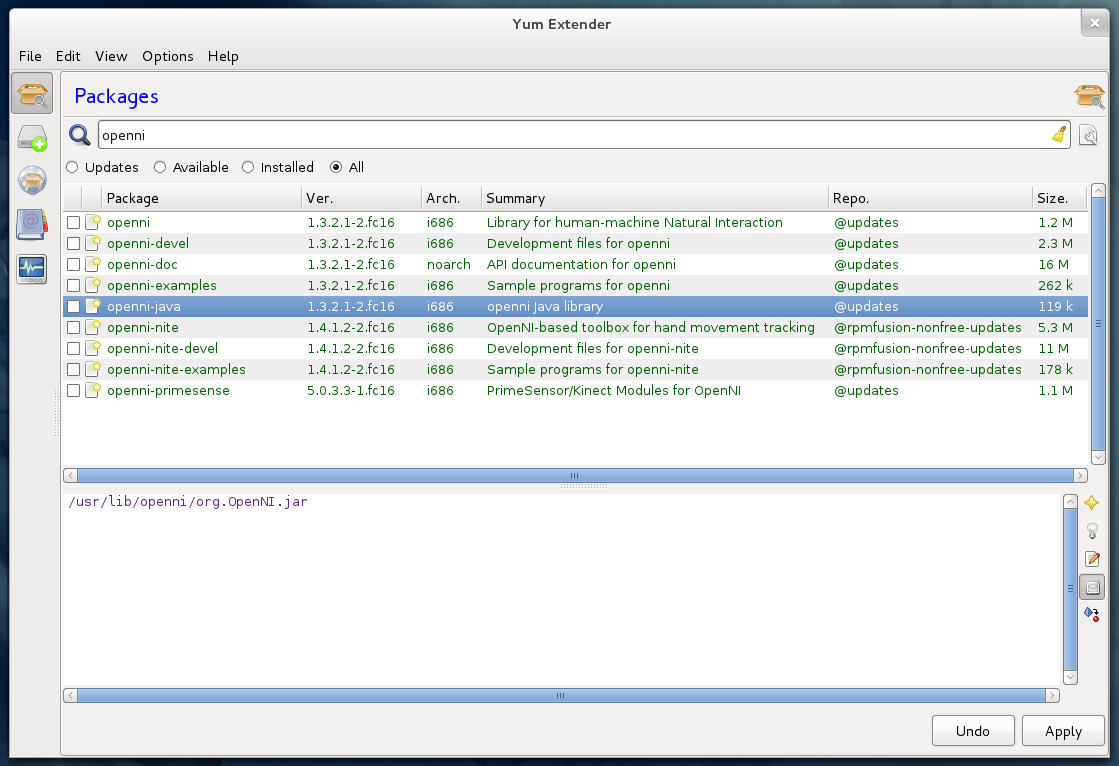
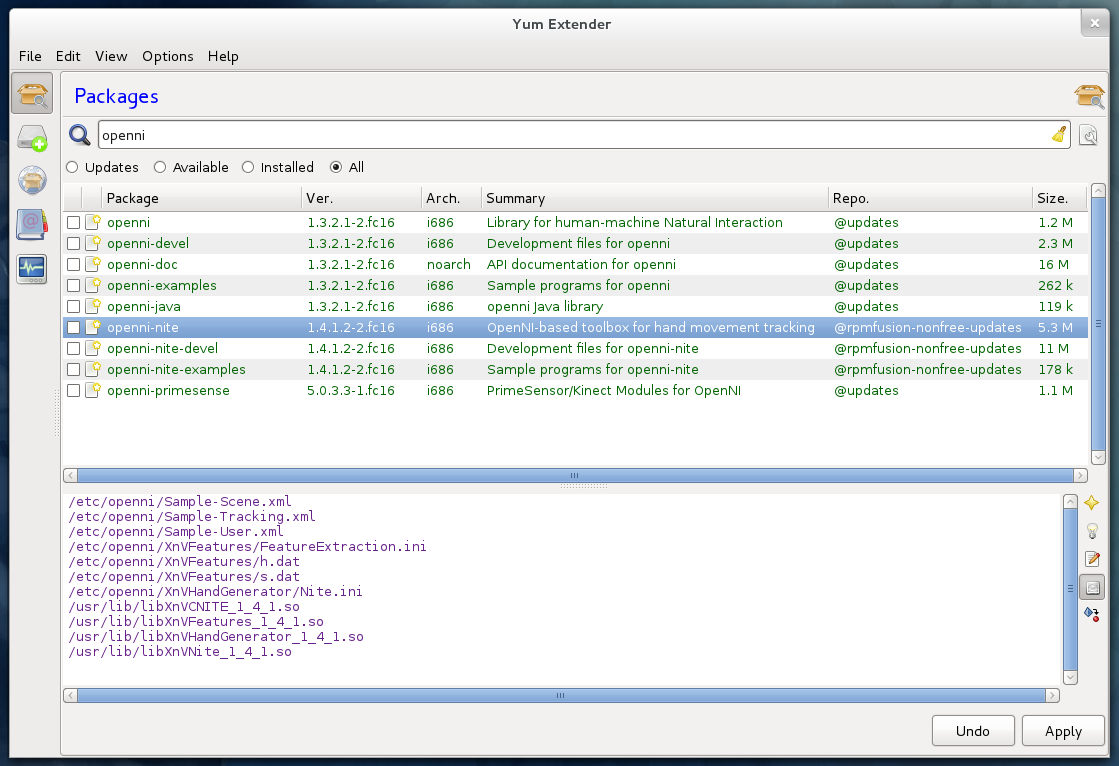
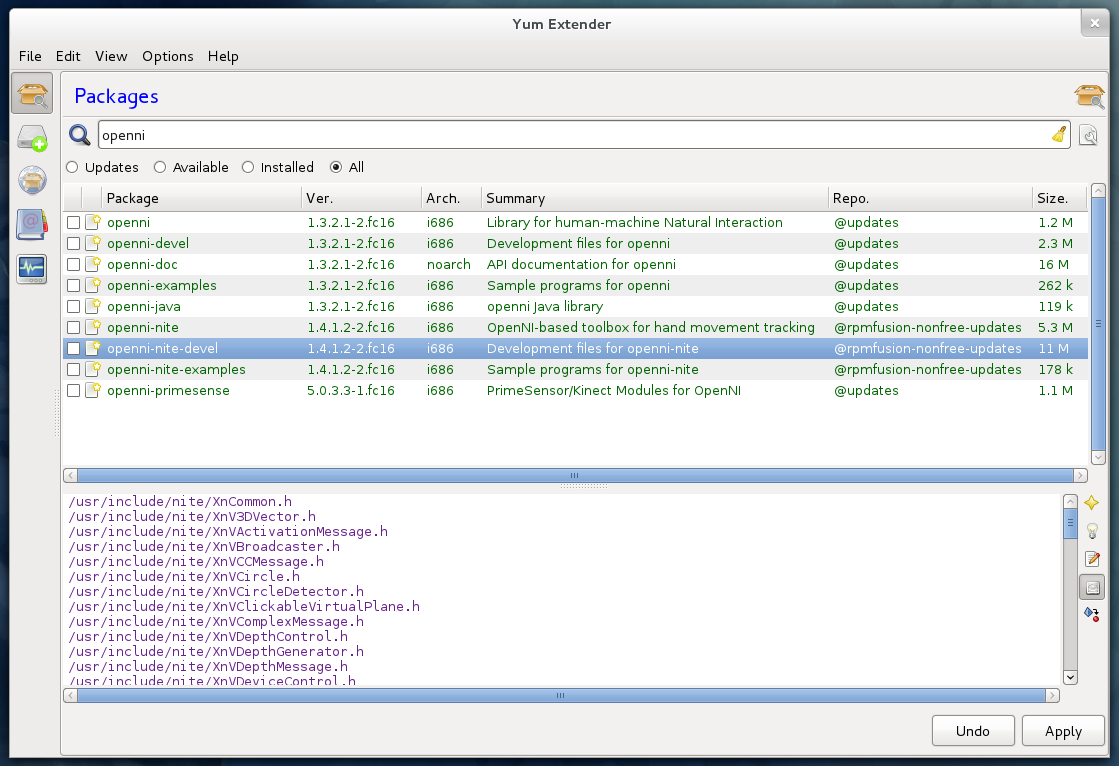
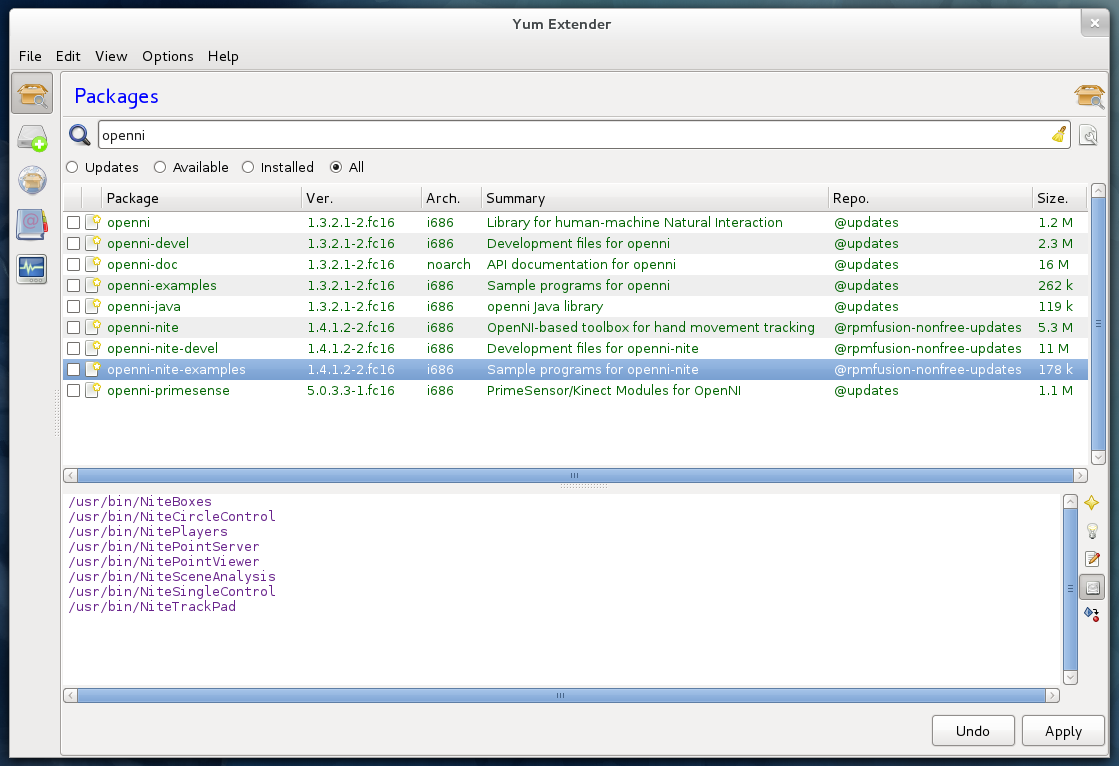
Nesvobodné balíčky openni-nite, openni-nite-devel a openni-nite-examples jsou k dispozici na RPM Fusion.
Uživatelé Ubuntu mohou balíčky získat na stránkách OpenNI. Nejsou-li k dispozici balíčky pro vaši oblíbenou distribuci, budete muset sáhnout po zdrojových kódech. Zdrojové kódy knihovny OpenNI (samozřejmě kromě NITE) jsou k dispozici na serveru GitHub (OpenNI, PrimeSense Sensor Module for OpenNI, OpenNI Ogre Integration Sample). Kinect není oficiálním PrimeSense modulem podporován. PrimeSense prosazuje ASUS Xtion. Na oficiální zdrojové kódy je nutné aplikovat záplaty, nebo použít již upravený modul od avin2. V případě problémů s překladem lze nahlédnou k Fedoře (Fedora Project Packages GIT repositories), zda nepomůže některá z jejích záplat. Jak to už u binárních blobů bývá, verze NITE, která je k dispozici na stránkách OpenNI nemusí být kompatibilní s aktuálními zdrojovými kódy na serveru GitHub. Také v případě použití binárních balíčků je nutné, aby byly verze základní knihovny, verze modulu a verze NITE vzájemně kompatibilní.
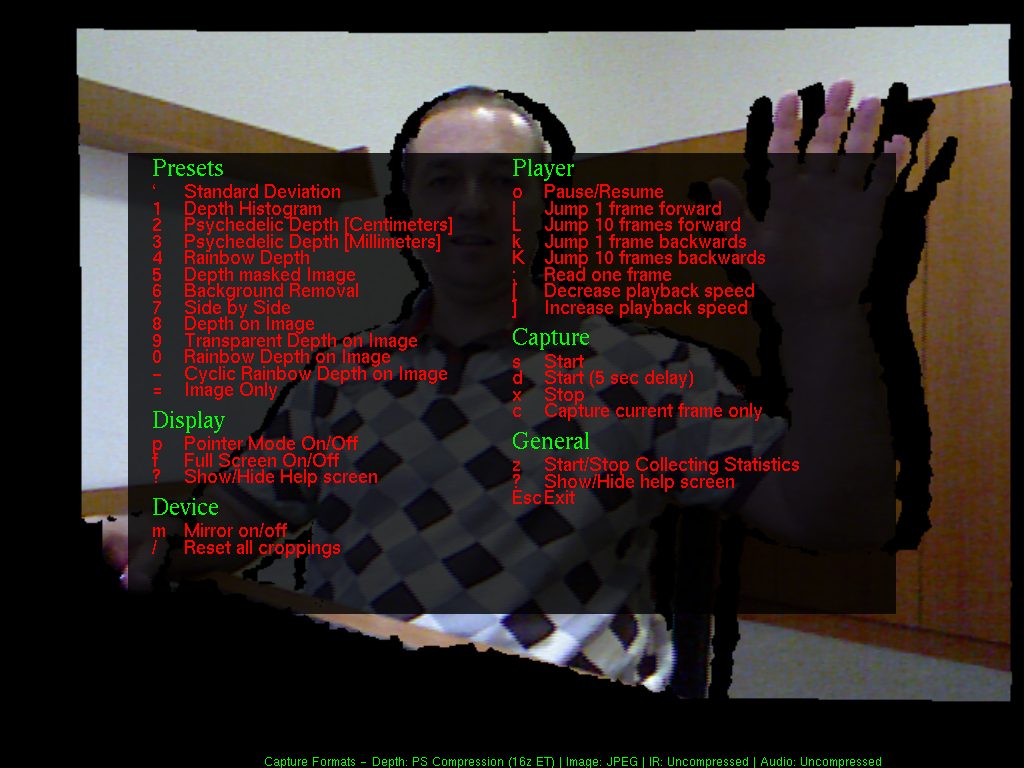
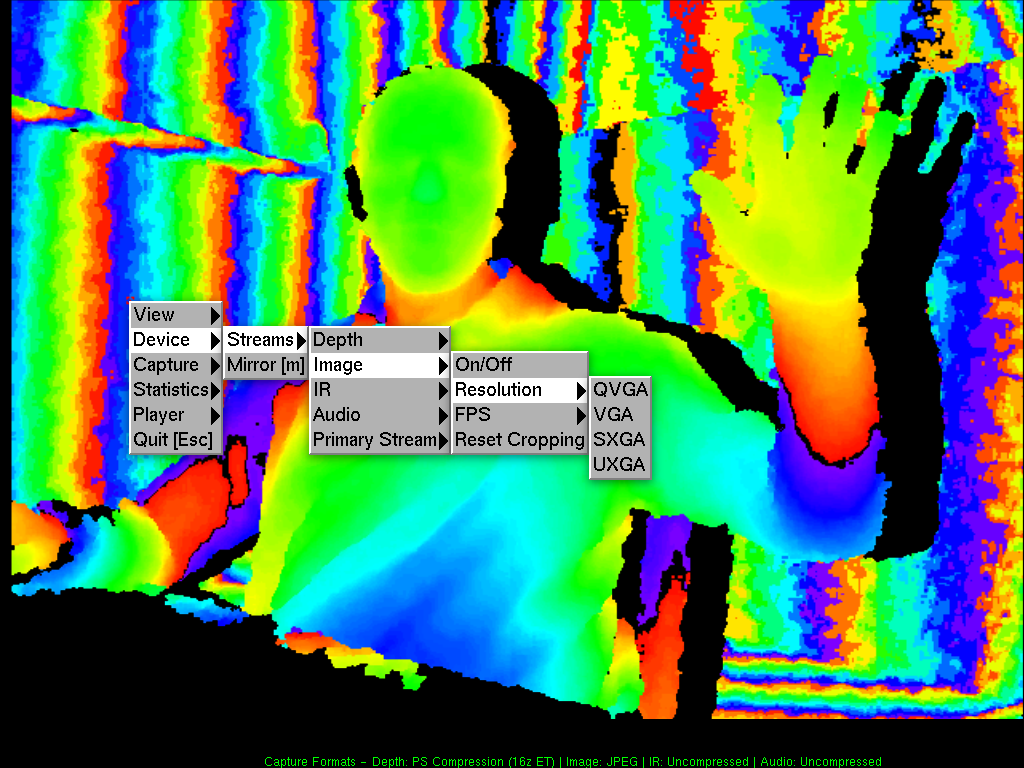
S knihovnou OpenNI jsou dodávány i ukázkové programy. Správnost instalace knihovny lze ověřit pomocí NiViewer. NiViewer, podobně jako glview z knihovny libfreenect, zobrazuje hloubková data získaná z Kinectu. Klávesou „f“ lze přepínat mezi celoobrazovkovým zobrazením a zobrazením v okně. Klávesou „?“ lze zobrazit nápovědu.

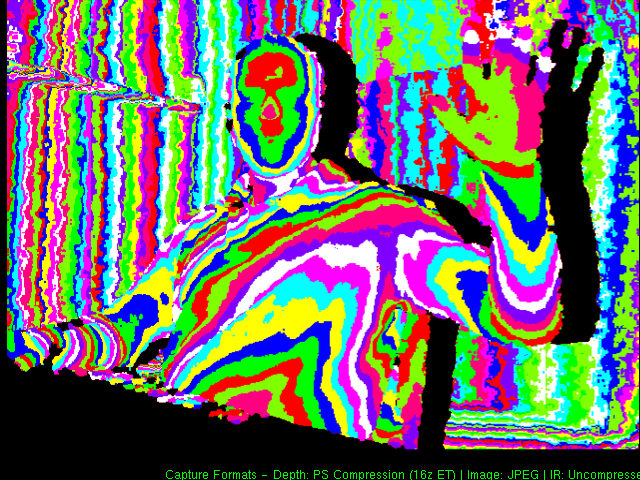
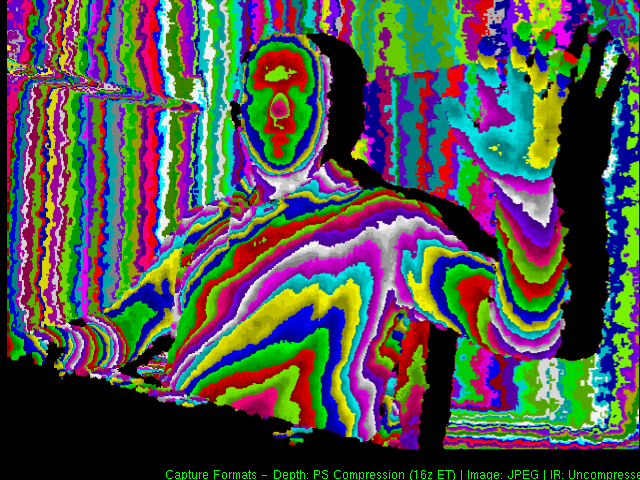
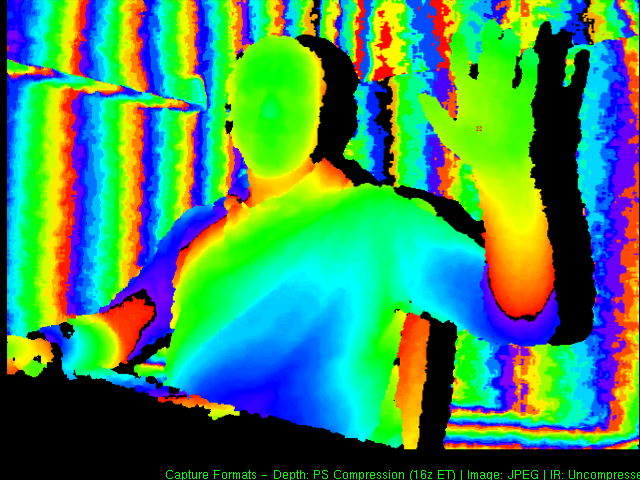
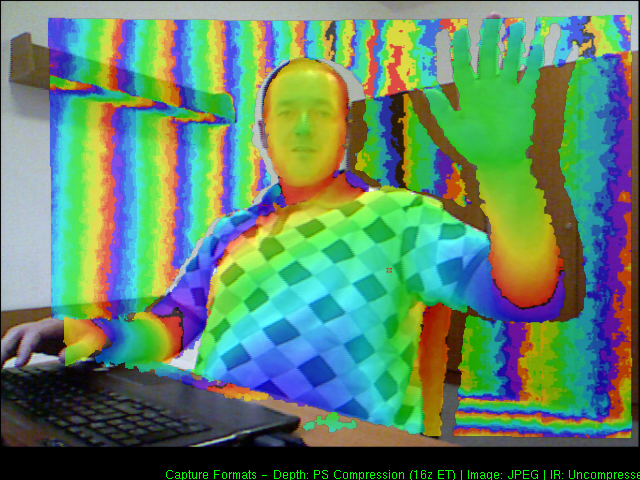
Mezi nabízenými pohledy lze procházet pomocí stisku kláves nebo myší výběrem z menu (dokumentace).
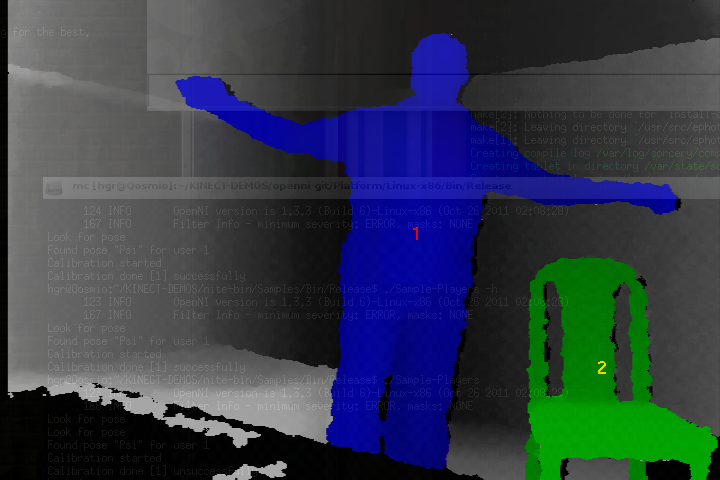
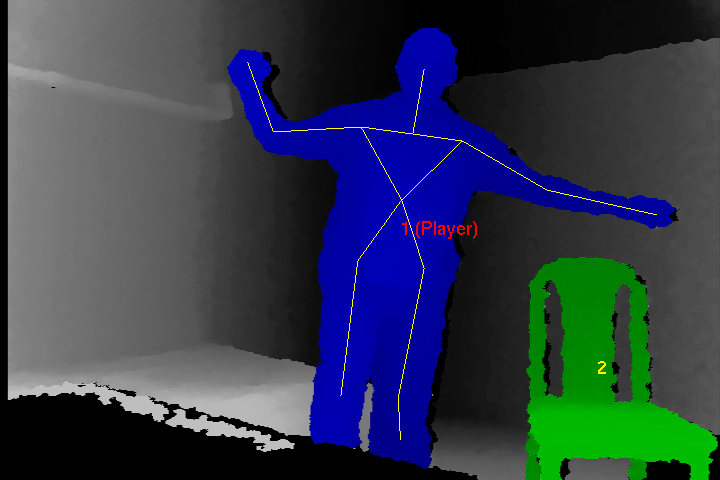
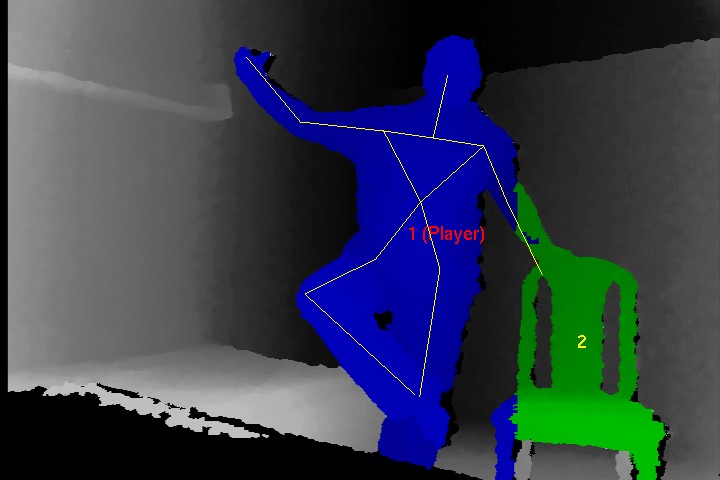
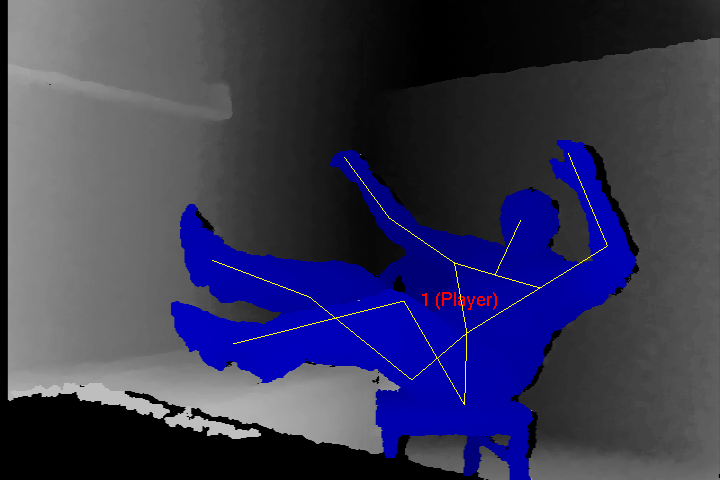
Po instalaci blobu NITE lze vyzkoušet rozpoznávání obrazu. Začít lze aplikací Sample-Players (NitePlayers). Objeví-li se v prostoru před Kinectem osoba (někdy stačí i židle  ), bude detekována a sledována. První osoba bude zobrazena modře, druhá zeleně, třetí žlutě. Aplikace rozezná také polohu těla. Na detekované postavě je zobrazen její zjednodušený model (skeleton, kostra). Má-li aplikace s detekcí problém, je nutné zaujmout postoj PSI (upažení pokrčmo, předloktí vzhůru).
), bude detekována a sledována. První osoba bude zobrazena modře, druhá zeleně, třetí žlutě. Aplikace rozezná také polohu těla. Na detekované postavě je zobrazen její zjednodušený model (skeleton, kostra). Má-li aplikace s detekcí problém, je nutné zaujmout postoj PSI (upažení pokrčmo, předloktí vzhůru).
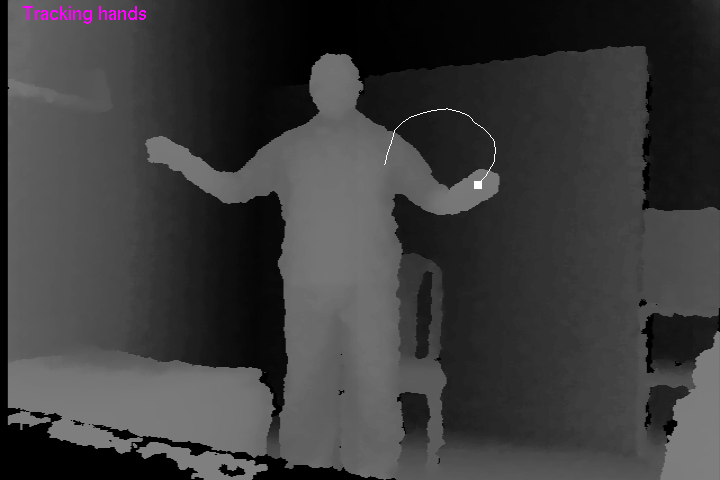
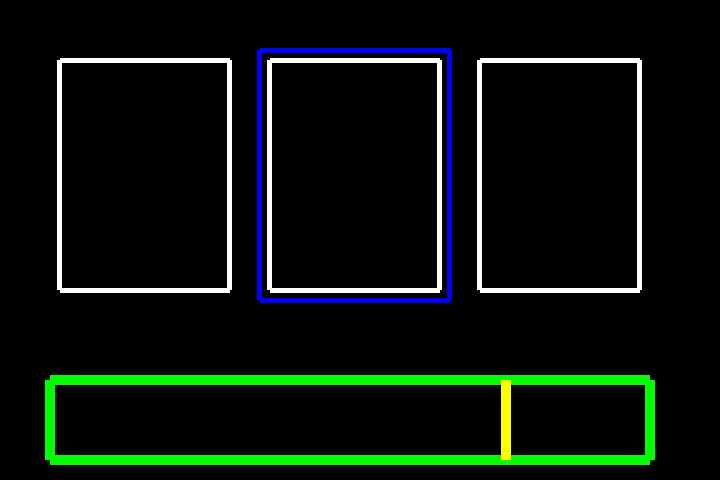
Ukázková aplikace Sample-PointViewer sleduje vaši ruku a kreslí trajektorii jejího pohybu. Standardně sleduje pouze jednu ruku. Po úpravě souboru Nite.ini, tj. po odstranění středníků u AllowMultipleHands=1 a TrackAdditionalHands=1 bude sledovat obě ruce. Aplikace Sample-Boxes a Sample-TrackPad demonstrují ovládání programů (výběr z voleb) pomocí pohybu ruky.
Při testování OpenNI ve Fedoře 16 jsem narazil na následující problém. Ukázkové aplikace nefungovaly. Například po spuštění NiteBoxes jsem dostal pouze „InitFromXml failed: File not found!“. Pomohl příkaz strace. NiteBoxes na Fedoře 16 přistupuje k souboru „../../../Data/Sample-Tracking.xml“. Stačilo tedy soubor /etc/openni/Sample-Tracking.xml zkopírovat do /Data. NitePlayers potřebuje v adresáři /Data soubor Sample-User.xml. NiteSceneAnalysis soubor Sample-Scene.xml.
Příště budou představeny některé z aplikací postavených nad knihovnami libfreenect a OpenNI.
Nástroje: Tisk bez diskuse
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 21.8.2012 22:40
little.owl | skóre: 22
| blog: Messy_Nest
| Brighton/Praha
21.8.2012 22:40
little.owl | skóre: 22
| blog: Messy_Nest
| Brighton/Praha
 22.8.2012 18:56
Bedňa | skóre: 34
| blog: Žumpa
| Horňany
22.8.2012 18:56
Bedňa | skóre: 34
| blog: Žumpa
| Horňany
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz