Přední technologické společnosti (Adobe, Cadence, Capital One, Cisco, Cloudera, Cloudflare, Cognition, CrowdStrike, Databricks, Dell Technologies, DoorDash, Elastic, HPE, Hugging Face, IBM, LangChain, Linux Foundation, Microsoft, NAVER, NetApp, Nous Research, NVIDIA, OpenClaw, Palantir, Palo Alto Networks, Red Hat, Reflection AI, Salesforce, SAP, ServiceNow, Siemens, SK Telecom, Snowflake, SpacexAI, Synopsys, Thinking
… více »Krabix.cz je online 3D konfigurátor krabiček pro 3D tisk s exportem do STL. Běží přímo v prohlížeči. Nic se neposílá na server.
Nadace Open Home Foundation spustila veřejnou preview verzi komunitní databáze zařízení pro Home Assistant. Má fungovat jako „Wikipedie pro chytrá zařízení".
Na stránce nového panelu Firefoxu přibudou nové widgety. Například denně aktualizována interaktivní křížovka.
PGSimCity (GitHub) je webová 3D vizualizace vnitřního fungování databázového systému PostgreSQL v podobě města. Vytvořena pomocí umělé inteligence.
UBports, nadace a komunita kolem Ubuntu pro telefony a tablety Ubuntu Touch, vydala Ubuntu Touch 24.04-2.0 a 24.04-1.4. Nová verze 24.04-2.0 již počítá s výřezy pro fotoaparát (notch) a zaoblenými rohy displeje. Webový prohlížeče Morph přešel z Chromia 87 na Chromium 134. Do shellu Lomiri byl přidán editor snímků obrazovky.
Byly zveřejněny informace o kritické zranitelnosti CVE-2026-64600 pojmenované RefluXFS (technické detaily) v XFS. Je tam již od verze Linuxu 4.11, tj. rok 2017. Jedná se o lokální eskalaci práv. Neprivilegovaný uživatel může editovat libovolný soubor, například klidně zrušit rootovské heslo v /etc/passwd. Videoukázka na Vimeo. V upstreamu je zranitelnost opravena.
OpenAI / ChatGPT má dnes výpadky (OpenAI Status, DownDetector).
Poskytovatel hostingu svobodných/open-source projektů Codeberg po hlasování na valné hromadě vydal stanovisko k využívání LLM. Kvůli vytěžování infrastruktury a rostoucím cenám hardwaru, ale také hrozbám pro spolupráci v komunitě se k LLM staví kriticky. Nebude poskytovat hosting projektů vytvářených LLM agenty.
Jack Dorsey představil (𝕏) open source týmovou komunikační platformu Buzz (GitHub) s cílem snížit závislost na Slacku a GitHubu.

Dělám do školy program na výpočet libovolného determinantu. Když jsem po týdnu vymyslel jak na to, tak mi to někde blbne. Nacpu tomu list (př [[1, 2, 3][4, 8, 7][8, 9, 6]]) vnořený list je řádek)
def detr(det, i): #Tohle upravuje determinant dělá z něj sub determinant
K = det
del K[0]
for y in xrange(len(K)):
del K[y][i]
return K
def determinant(det, stupen):
if stupen == 2:
d = det[0][0]*det[1][1] - det[0][1]*det[1][0]
else:
d = 0
for i in xrange(stupen):
M = detr(det, i)
print stupen
d = d + (-1)**(i-1)*det[0][i]*determinant(M, (stupen -1) )
return d
Až po první determinant 2. stupně to jede dobře, jenže když to má udělat další determinant 2. stupně, tak se to K zase zkrátí a já už prostě nevím, jak udělat to zkracovaní. Předem moc dík za každou radu. Vím, že existuje numpy, ale v zadání je zpracujte algoritmus. Kdyby měl někdo jiný nápad na řeší determinantů přivítal bych to.
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 28.2.2008 21:24
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
28.2.2008 21:24
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
Momentálně si vzpomenu jen na výpočet rozkladem a to by se snad dělalo rekurzí, když neznáš předem hodnost matice?
 28.2.2008 21:35
Saljack | skóre: 28
| blog: Saljack
| Praha
28.2.2008 21:42
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
28.2.2008 21:35
Saljack | skóre: 28
| blog: Saljack
| Praha
28.2.2008 21:42
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
Ok, do pythonu jsem se ještě nedostal. Ten součet permutací, sudejch a lichejch sloupců a řádků asi zohledňuješ?
28.2.2008 21:45
Saljack | skóre: 28
| blog: Saljack
| Praha
 28.2.2008 21:47
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
28.2.2008 21:47
vencour | skóre: 56
| blog: Tady je Vencourovo
| Praha+západní Čechy
Mluvim o tom, že na řádku 1, skoupci 1, je determinant kladnej, na 1/2 je zápornejm na 2/2 kladnej ...
28.2.2008 21:59
Saljack | skóre: 28
| blog: Saljack
| Praha
y = [1, 2, 3]
x = y
del x[0]
if y[0] == 2 :
print "true"
x=y[:]. Doporučuju přečíst si nějakou učebnici Pythonu, tohle by měl být základ.
29.2.2008 08:42
Saljack | skóre: 28
| blog: Saljack
| Praha

Možná že to máš "dobře" (i když když to nefunguje tak asi těžko...), ale prakticky je to zcela nepoužitelný. Protože u algoritmu se složitostí O(n!) končíš na n v řádu jednotek.
Takže ten kód rovnou zahoď a napiš si prachobyčejnou Gaussovu eliminaci. Vynásobenim prvků na diagonále pak získáš determinant. Složitost O(n^3).
pr = r < vr ? r : r + 1; ps = s < vs ? s : s + 1;Ten zbytek už je jednoduchý.
Do matice přistupuj nepřímo přes vektor indexů. Takový vektor ti stačí jeden - pro sloupce nebo řádky, ale musíš rozvíjet vždy podle prvního řádku nebo prvního sloupce (v kroku k, k-ého sloupce _původní_ matice).
V indexovém vektoru můžeš buď vyšktrtávat (měnit ho, měnit jeho délku), nebo jen prohazovat prvky v(1)..v(k) jsou nevyškrtané sloupce, v(k+1)..v(n) vyškrtané, musíš si teda pamatovat k. Vyškrtnutí sloupce j: a = v(j); v(j) = v(k); v(k) = a; k = k - 1;
Ale fakt radši tu gaussovku...
29.2.2008 10:13
Saljack | skóre: 28
| blog: Saljack
| Praha
Kdybyses podíval na ten odkaz, co jsem ti dal...
BTW až nakonec budeš tu G. elim. psát, tak nezapomínej, co s determinantem udělá vynásobení řádku koeficientem atd.
A když něco nechápeš (jak sám říkáš), tak neříkej, že je to na nic, na tohle jsem háklivej
29.2.2008 10:29
Saljack | skóre: 28
| blog: Saljack
| Praha
 Ujisti se, že koukáš na část 9 Algorithmic implementation hesla Determinant na americké Wikipedii. Pak se pozvolna vrať k tomu, že jsem debil
29.2.2008 11:36
Saljack | skóre: 28
| blog: Saljack
| Praha
. Moc dík že tady se mnou ztrácíš čas
Ujisti se, že koukáš na část 9 Algorithmic implementation hesla Determinant na americké Wikipedii. Pak se pozvolna vrať k tomu, že jsem debil
29.2.2008 11:36
Saljack | skóre: 28
| blog: Saljack
| Praha
. Moc dík že tady se mnou ztrácíš čas
Už jsem to pochopil.
Nepochopil. Zkus to tady, třeba tomu budeš rozumět v češtině líp.
Pokuď v GEM používáš pouze úpravu typu přičtení násobku řádku k jinému řádku jak je obvyklé, získáš determinant původní matice pouhým vynásobením prvků na diagonále trojúhelníkové matice vzniklé z matice původní pomocí GEM.
Nevím jaký je přesně zadání, ale pokuď v něm neni, že se MUSÍ použít výpočet pomocí subdeterminantů, tak výše uvedenj postup použít rozhodně lze. Naopak, pokuď v zadání není dáno, že musíš použít výpočet pomocí subdeterminantů, měl by tě s tím co tady "patláš" zadavatel okamžitě vyhodit. Protože s někým, kdo použije algoritmus s O(n!) tam, kde existuje jednodušší algoritmus s O(n^3) se nic jinýho udělat nedá...
 29.2.2008 12:46
tsLnox | skóre: 31
| blog: Blog jednoho ukecaného Gentoolemana
| Žďár nad Sázavou
29.2.2008 12:46
tsLnox | skóre: 31
| blog: Blog jednoho ukecaného Gentoolemana
| Žďár nad Sázavou
 28.2.2008 22:01
freshmouse | skóre: 42
| blog: Bruno Banány
29.2.2008 17:27
freshmouse | skóre: 42
| blog: Bruno Banány
28.2.2008 22:01
freshmouse | skóre: 42
| blog: Bruno Banány
29.2.2008 17:27
freshmouse | skóre: 42
| blog: Bruno Banány
Tyjo to jsem dělal ještě na střední ve druháku. Můžu dát jedině kód v C#, ale nijak za něj neručím, v té době jsem ještě ani nevěděl, co je to lineární algebra a C# jsem taktéž moc neovládal. Takže nepište že jsem vůl a tak.
using System;
namespace Calc
{
public class Matrix
{
protected double[,] MatrixData;
protected int my, nx;
//
//INDEXER
//
//for access to mambers
//arrays are indexing from 0! but matrix from 1
public double this [int m, int n]
{
get
{
return MatrixData[m-1, n-1];
}
set
{
MatrixData[m-1, n-1] = value;
}
}
//
//CONSTRUCTORS
//
//constructor with size of MatrixData
public Matrix(int m, int n)
{
//m+1 and n+1 for counting from 1 (matrix is a11 .. amn)
MatrixData = new double[m, n];
my = m;
nx = n;
}
//matrix from array and size
public Matrix(double[,] MatrixArray, int m, int n)
{
MatrixData = new double[m, n];
for(int x = 0; x <= m-1; x++)
for(int y = 0; y <= n-1; y++)
MatrixData[x, y] = MatrixArray[x, y];
my = m;
nx = n;
}
//new matrix from existing matrix
public Matrix(Matrix ExistingMatrix)
{
MatrixData = ExistingMatrix.GetMatrix();
my = ExistingMatrix.GetM();
nx = ExistingMatrix.GetN();
}
//
//OPERATORS
//
//addition Matrix+Matrix
public static Matrix operator+(Matrix A, Matrix B)
{
//size of matrix must be the same as A and B
Matrix C = new Matrix(A);
for(int m = 1; m <= A.GetM(); m++)
for(int n = 1; n <= A.GetN(); n++)
C[m, n] = A[m, n] + B[m, n];
return C;
}
//multiply Matrix*Matrix
public static Matrix operator*(Matrix A, Matrix B)
{
Matrix C = new Matrix(A.GetM(), B.GetN());
double sum;
for(int m = 1; m <= A.GetM(); m++)
for(int n = 1; n <= B.GetN(); n++)
{
sum = 0;
for(int i = 1; i <= A.GetN(); i++)
sum += A[m, i] * B[i, n];
C[m, n] = sum;
}
return C;
}
//multiply double*Matrix
public static Matrix operator*(double a, Matrix B)
{
Matrix C = new Matrix(B);
for(int m = 1; m <= B.GetM(); m++)
for(int n = 1; n <= B.GetN(); n++)
C[m, n] = a * B[m, n];
return C;
}
//multiply Matrix*double
public static Matrix operator*(Matrix A, double b)
{
return b * A;
}
//compare
public static bool operator==(Matrix A, Matrix B)
{
return A.Equals(B);
}
//compare
public static bool operator!=(Matrix A, Matrix B)
{
return !A.Equals(B);
}
//invert
public static Matrix operator~(Matrix X)
{
return X.Invert();
}
//
//GETS
//
//returns array with matrix
public double[,] GetMatrix()
{
return (double[,])MatrixData.Clone();
}
//returns m - y size
public int GetM()
{
return my;
}
//returns n - x size
public int GetN()
{
return nx;
}
public override bool Equals(object obj)
{
if(obj is Matrix)
{
Matrix A = (Matrix)obj;
for(int m = 1; m <= this.GetM(); m++)
for(int n = 1; n <= this.GetN(); n++)
if(this[m, n] == A[m, n])
return true;
return false;
}
else
return false;
}
//
//COUNTING
//
//second determinant
public double Determinant2()
{
return this[1, 1] * this[2, 2] -
this[1, 2] * this[2, 1];
}
//third determinant
public double Determinant3()
{
return this[1, 1] * this[2, 2] * this[3, 3] -
this[1, 1] * this[2, 3] * this[3, 2] +
this[1, 2] * this[2, 3] * this[3, 1] -
this[1, 2] * this[2, 1] * this[3, 3] +
this[1, 3] * this[2, 1] * this[3, 2] -
this[1, 3] * this[2, 2] * this[3, 1];
}
//n-scale determinant
public double Determinant(int n)
{
switch(n)
{
case 2:
return Determinant2();
case 3:
return Determinant3();
default:
double result = 0;
for(int i = 1; i <= this.GetN(); i++)
result += this[1, i] * this.Addition(1, i);
return result;
}
}
//addition of mamber
public double Addition(int m, int n)
{
Matrix X = new Matrix(this.GetM()-1, this.GetM()-1);
int i = 1, j;
for(int x = 1; x <= this.GetM(); x++)
{
j = 1;
for(int y = 1; y <= this.GetM(); y++)
{
if(m != x && n != y)
{
X[i, j] = this[x, y];
j++;
}
}
if(x != m)
i++;
}
return System.Math.Pow(-1, m+n) * X.Determinant(this.GetM()-1);
}
//invert matrix
public Matrix Invert()
{
Matrix X = new Matrix(this.GetM(), this.GetM());
for(int m = 1; m <= this.GetM(); m++)
for(int n = 1; n <= this.GetN(); n++)
X[n, m] = this.Addition(m, n);
return (1/this.Determinant(this.GetM())) * X;
}
//rotate matrix right
public void RotateRight()
{
Matrix X = new Matrix(this.GetN(), this.GetM());
for(int m = 1; m <= this.GetM(); m++)
for(int n = 1; n <= this.GetN(); n++)
X[n, this.GetM() - m + 1] = this[m, n];
MatrixData = X.GetMatrix();
my = X.GetM();
nx = X.GetN();
}
public Matrix Transpone()
{
Matrix X = new Matrix(this.GetN(), this.GetM());
for(int m = 1; m <= this.GetM(); m++)
for(int n = 1; n <= this.GetN(); n++)
X[n, m] = this[m, n];
return X;
}
public override string ToString()
{
string s = "";
for(int m = 1; m <= this.GetM(); m++)
{
s += "(";
for(int n = 1; n < this.GetN(); n++)
s += this[m, n].ToString() + "; ";
s += this[m, this.GetN()].ToString() + ")\n";
}
return s;
}
public object Clone()
{
return new Matrix(this);
}
}
} nic ve zlém...).
29.2.2008 16:56
freshmouse | skóre: 42
| blog: Bruno Banány
.
29.2.2008 16:36
freshmouse | skóre: 42
| blog: Bruno Banány
nic ve zlém...).
29.2.2008 16:56
freshmouse | skóre: 42
| blog: Bruno Banány
.
29.2.2008 16:36
freshmouse | skóre: 42
| blog: Bruno Banány
Jeho jediným problémem je, že se v něm asi dá těžko dělat v týmu...Řekl bych, že existence CPANu to dosti přesvědčivě vyvrací
Neznám Python ani Perl, ale Python opravdu není "jen hezčí Perl".To zrovna nezní jako kvalifikovaný názor
29.2.2008 20:07
freshmouse | skóre: 42
| blog: Bruno Banány
Mno, CPAN není nic v týmu, tam může přispět každý -- svým oblíbeným stylem zápisu programu... Že neznám Python a Perl znamenalo, že je neznám dokonale, neprogramuju v nich, ale něco málo bych o nich věděl.
to nie, on je len obeťou masívnej ohováracej kampane tých, čo mu nie sú schopní porozumieť
ne kvuli obsahu toho zdrojáku, ale kvůli tomu, že jsi ho nepřidal jako přílohu ke příspěvku.
A prosím nebrat vážně tvrzení, že jsi vůl, nebýt toho, žes to sám použil, nenazval bych tě tak (proto ten smajlík)
Používá to totiž úplně stejný naprosto nešikovný algoritmus jako ten, o kterém je řeč.
 29.2.2008 14:46
KOLiK | skóre: 6
| blog: na_drate
29.2.2008 14:46
KOLiK | skóre: 6
| blog: na_drate
from numpy import matrix from scipy.linalg import det A = matrix([[1,2],[3,4]]) print det(A)
#!/usr/bin/python
def detr(det, i):
K = det
del K[0]
for y in xrange(len(K)):
del K[y][i]
return K
def determinant(det, stupen):
print "Stupen1: " , stupen
if stupen == 2:
print "Stupen2a: " , stupen
d = det[0][0]*det[1][1] - det[0][1]*det[1][0]
else:
print "Stupen2b: " , stupen
d = 0
print "len det 0 " , len(det[0])
for i in xrange(stupen):
M = detr(det, i)
print "det[0][",i,"]=",det [0][i]
print "M=",M
print "det=",det
d = d + (-1)**(i-1)*det[0][i]*determinant(M, (stupen -1) )
print "Subdeterminant pro " , stupen , " je " , d
return d
mat=[[1, 2, 3],[4, 8, 7],[8, 9, 6]]
print determinant(mat,len(mat));
Bohuzel mi to ale hlasi chybu - tohle je cely vystup z toho programu.
Stupen1: 3
Stupen2b: 3
len det 0 3
det[0][ 0 ]= 8
M= [[8, 7], [9, 6]]
det= [[8, 7], [9, 6]]
Stupen1: 2
Stupen2a: 2
Subdeterminant pro 2 je -15
det[0][ 1 ]=
Traceback (most recent call last):
File "./det.py", line 30, in ?
print determinant(mat,len(mat));
File "./det.py", line 21, in determinant
print "det[0][",i,"]=",det [0][i]
IndexError: list index out of range
Pokud jsem python dobre pochopil a podle vypisu interpretoval, tak python predava seznamy jako odkazy a nedela kopie. Cili, jakakoliv destruktivni zmena seznamu K (resp. parametru "det") ve funkci detr se projevi zmenou puvodniho seznamu "det" ve funkci determinant. Jak jsem psal, nejsem pythonista, takze ti neporadim, jak udelat kopii seznamu a predat do funkce k destrukci tak, aby puvodni seznam zustal, ale nejakej pythonista by to vedet mohl. Zkusim jeste mrknou na nejaky ucebnice, neco by se najit mohlo.
#!/usr/bin/perl
sub detr {
my ($i,$k)=@_;
my $r=[];
for (my $y=1;$y<scalar(@{$k});$y++) {
push @{$r},[@{$k->[$y]}];
splice @{$r->[$y-1]},$i,1;
}
return $r;
}
sub determinant {
my ($det)=@_;
my $stupen=scalar(@{$det});
if ($stupen==1) {
return $det->[0][0];
} elsif ($stupen==2) {
return $det->[0][0]*$det->[1][1]-$det->[0][1]*$det->[1][0];
} else {
my $d=0;
for (my $i=0;$i<$stupen;$i++) {
my $m=detr($i,$det);
$d+=(-1)**($i)*$det->[0][$i]*determinant($m);
}
return $d;
}
}
$mat=[
[1,2,3],
[4,8,7],
[8,9,6]
];
print determinant($mat) . "\n";
A mam k tomu par komentaru:
(-1)**(i-1), ale spravne ma byt (-1)**i, protoze ten vzorecek je spravne (-1)**(radek+sloupec) takze zacinas 0+0, coz je nula a -1 na nultou je jedna kladna, takze je to dobre, ale tobe vychazi pro prvni hodnotu, kdy i==0, -1 na -1, coz je -1 a to je spatne. Pouzitim konkretniho jazyka se z tebe lepsi programator nestane. On si kazdej mysli, ze kdyz se nauci python, tak bude umet programovat. Neni to tak, je uplne jedno, jaky jazyk pouzijes, pokud ten jazyk neznas dobre, nechapes vnitrni funkci a neumis vytvorit spravne algoritmus, tak to za tebe zadny jazyk neudela. Mozna navic, kdybys tohle delal v Cecko (nemyslim C+ ani C#, ale klasicky Cecko), pripadne rovnou assembler (teda hlavne tim myslim tu praci s polema), tak bys chybu nasel zrejme hned. Bohuzel ten python oslepil (nebo mozna lidi, kteri ho presprilis vychaluji) a nevidis, co jsi skutecne naprogramoval. Takze klidne v pythonu pokracuj, ale nauc se ho poradne.
$a=[ [1,2,3] ];
$b=[ [@{$a->[0]}] ];
ono to sice vypada neprehledne, ale pokud clovek zna aspon zaklady perlu, tak to uvidi hned. $a je reference na anonymni array, ktery obsahuje jeden prvek a tim je odkaz na anonymni array se tremi prvky 1, 2 a 3. Na druhem radku pak vytvarim do promenne $b referenci na jiny anonymni array, do ktereho vlozim jeden prvek, ktery je odkaz na dalsi anonymni pole, do ktereho vlozim hodnoty - a ty se vlozit zpusobem takovym, ze se odkazu na 1.prvek (index 0) anonymniho pole odkazovaneho promennou $a $a->[0], tento prvek obsahuje odkaz na anonymni pole s prvky 1, 2, 3, takze to necham vyhodnotit jako obycejne pole @{$a->[0]}, coz bude prave to pole tech hodnot (uz to tedy nebude odkaz na to anonymni pole, ale konkretni -zkopirovane- hodnoty) a ty se mi vlozi do toho noveho anonymniho pole [ @{$a->[0]} ], ktere je ulozene jako prvni prvek celeho anonymniho pole odkazovaneho prom. $b = [ [ @{$a->[0]} ] ]
Kdyz se pokusim v pythonu udelat tohle
>>> a=[ [ 1,2,3] ] >>> b=[] >>> c=[] >>> b+=[a[0]] >>> c.append(a[0]) >>> a [[1, 2, 3]] >>> b [[1, 2, 3]] >>> c [[1, 2, 3]] >>> del b[0][1] >>> del c[0][1] >>> a [[1]] >>> b [[1]] >>> c [[1]]vidite sami, ze oba zpusoby
b+=... i c.append nevlozi konkretni hodnoty, ale referenci. V docu k pythonu to pisou, ze se kopiruje reference, ale nenasel jsem nic o tom, jak seznam vratit jako novy seznam hodnot.
#!/usr/bin/perl
use Data::Dumper;
sub detr {
my ($i,$k)=@_;
my $r=[];
for (my $y=1;$y<scalar(@{$k});$y++) {
push @{$r},[@{$k->[$y]}];
splice @{$r->[$y-1]},$i,1;
}
return $r;
}
sub determinant {
my ($det)=@_;
my $stupen=scalar(@{$det});
if ($stupen==1) {
return $det->[0][0];
} else {
my $d=0;
for (my $i=0;$i<$stupen;$i++) {
my $m=detr($i,$det);
$d+=(-1)**($i)*$det->[0][$i]*determinant($m);
}
return $d;
}
}
$mat=[
[1,2,3],
[4,8,7],
[8,9,6]
];
print determinant($mat) . "\n";
a=[[1], [2], [3], [4], [5, "a"]]
for i in range(0,len(a)):
b=a[:i]+a[i+1:]
print b
Jinak vytvoření kopie listu není problém:
b=list(a)
a=[1,2,3]
b=a[:]
a nebo modul copy a funkce deepcopy:)
#!/usr/bin/python
# vim:set et:
def detr(det, i):
K = []
for y in range(1,len(det)):
K.append(det[y][:i]+det[y][i+1:])
return K
def determinant(det, stupen):
if stupen == 2:
d = det[0][0]*det[1][1] - det[0][1]*det[1][0]
else:
d = 0
for i in xrange(stupen):
M = detr(det, i)
d = d + (-1)**i*det[0][i]*determinant(M, (stupen -1) )
return d
mat=[[1, 2, 3],[4, 8, 7],[8, 9, 6]]
print determinant(mat,len(mat));
a pak jeste pokud bys chtel koncit az ve stupni 1
#!/usr/bin/python
# vim:set et:
def detr(det, i):
K = []
for y in range(1,len(det)):
K.append(det[y][:i]+det[y][i+1:])
return K
def determinant(det, stupen):
if stupen == 1:
d = det[0][0]
else:
d = 0
for i in xrange(stupen):
M = detr(det, i)
d = d + (-1)**i*det[0][i]*determinant(M, (stupen -1) )
return d
mat=[[1, 2, 3],[4, 8, 7],[8, 9, 6]]
print determinant(mat,len(mat));
No, vypada to, ze to chodi. Tak snad to pomuze.
Vždycky mě dostane do kolen, když script-kiddies hodlají "optimalizovat" svůj algoritmus s exponenciální složitostí pro problém, kde existuje řešení s polynomiální složitostí pomocí podobnejch metod...
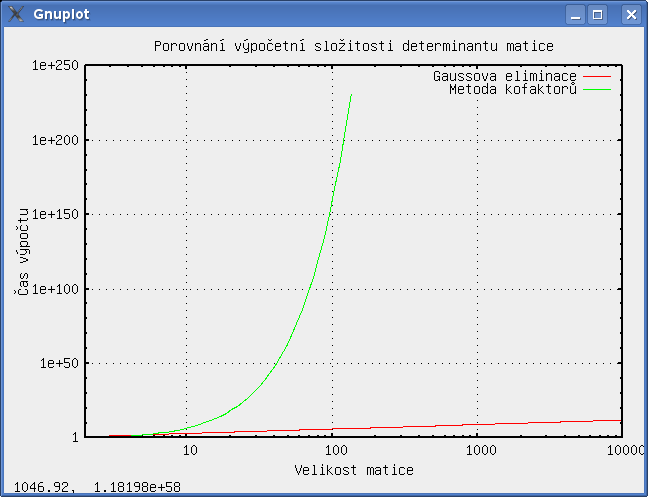
Pro ty co by snad na tuhle diskuzi narazili někdy v budoucnu a chtěli odsud kopírovat některý z uvedených kódů v příloze uvádim obrázek, po jehož shlédnutí by si to měl rozmyslet i negramotný chovanec Guatemalského ústavu pro choromyslné...
mat A[X,X]=[ hodnoty matice] det(A)a mam vypocet rychle a presne (prepokladam, ze v takovym programu budou pouzity jedny z nejrychlejsich algoritmu). Nicmene, hledani chyb v cizich programech je dobra skola programovani. Clovek u toho musi premyslet, co tim chtel autor vlastne rict a kde je teda chyba.
1.3.2008 15:01
freshmouse | skóre: 42
| blog: Bruno Banány
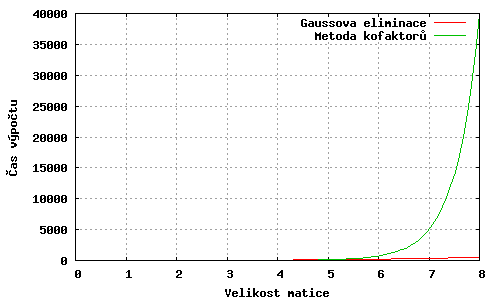
V gnuplotu.
set terminal png size 500,300
set output "determinant.png"
set xrange [0:8]
set grid
set xlabel "Velikost matice"
set ylabel "Čas výpočtu"
plot x**3 title "Gaussova eliminace", \
sqrt(2*pi*x)*x**x * exp(-x) title "Metoda kofaktorů"
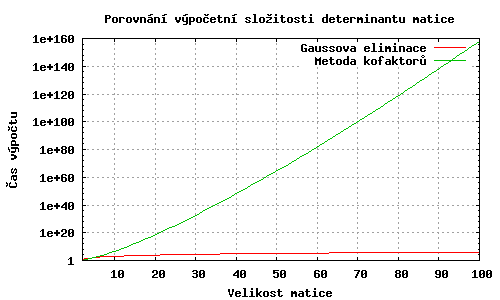
Možná ještě jeden "údernější":
set terminal png size 500,300
set output "determinant.png"
set xrange [2:100]
set logscale y
set grid
set title "Porovnání výpočetní složitosti determinantu matice"
set xlabel "Velikost matice"
set ylabel "Čas výpočtu"
plot x**3 title "Gaussova eliminace", \
sqrt(2*pi*x)*x**x * exp(-x) title "Metoda kofaktorů"
Chápu Gaussovu eliminaci dobře
Ne tak docela. LU dekompozice není částí Gaussovy eliminace. Zjednodušeně řečeno je LU dekompozice modifikovanou Gaussovou eliminací.
LU dekompozice rozkládá původní matici na součin dou trojúhelníkových matic (jedna dolní a jedna horní), Gausova eliminace matici pouze upravuje na horní trojúhelníkový tvar. K efektivnímu výpočtu determinantu se nicméně dá použít jak LU dekompozice tak Gaussova eliminace.
Jinak "finta" je skutečně v tom, že jediný nenulový součin z výpočtu determinantu je u trojúhelníkové matice právě ten na diagonále.
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz 29.2.2008 09:56
29.2.2008 09:56
 29.2.2008 15:22
29.2.2008 15:22
{kind=link}
{kind=link}
{kind=link}
{kind=link}